Department of Biology, University of North Carolina Chapel Hill, NC, USA.
Front Cell Dev Biol. 2016 Feb 18;4:10. doi: 10.3389/fcell.2016.00010. eCollection 2016.
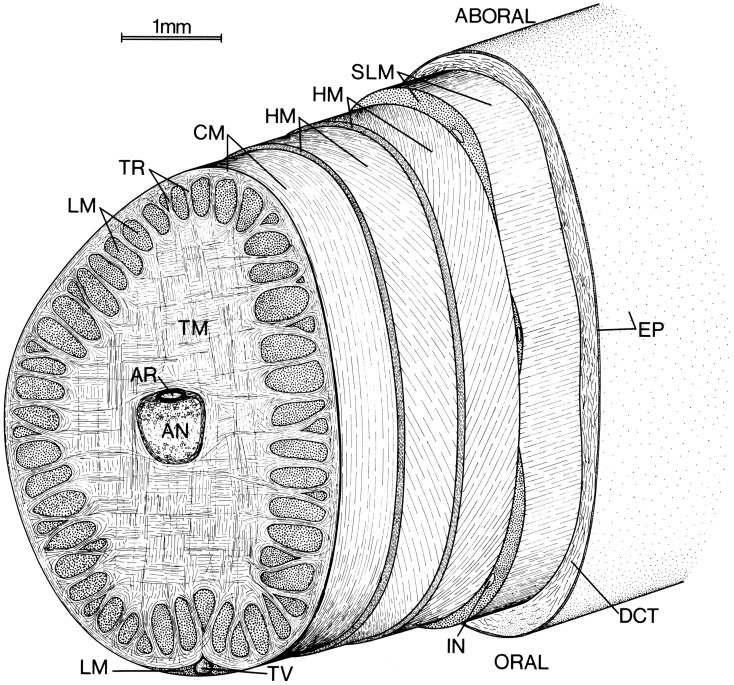
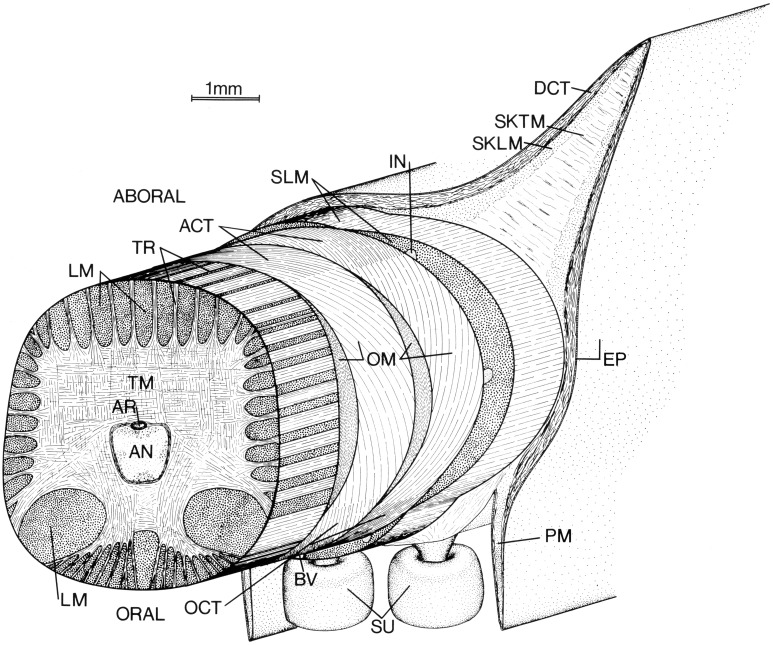
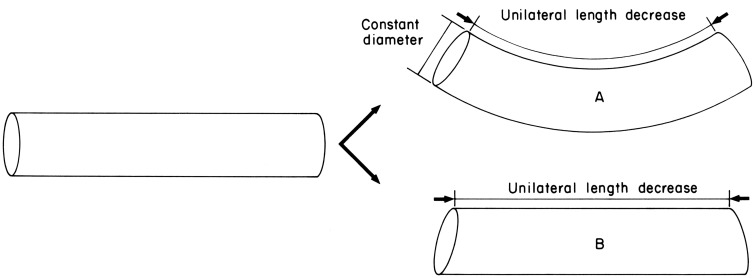
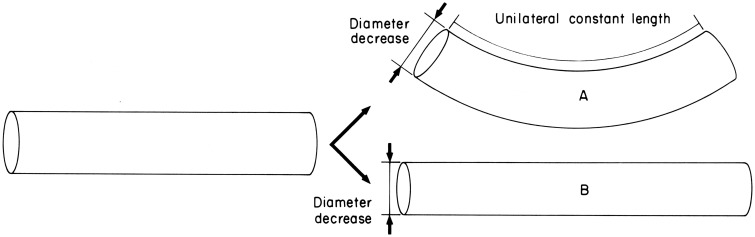
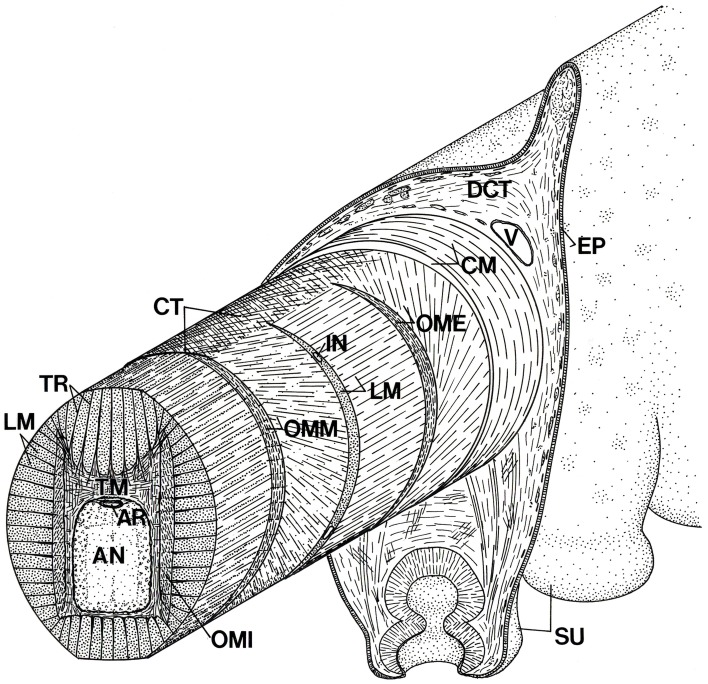
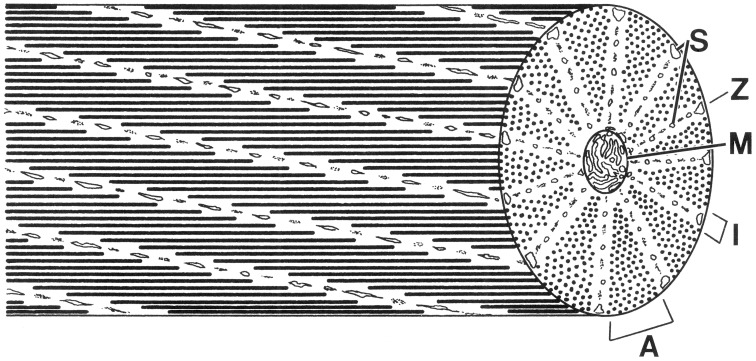
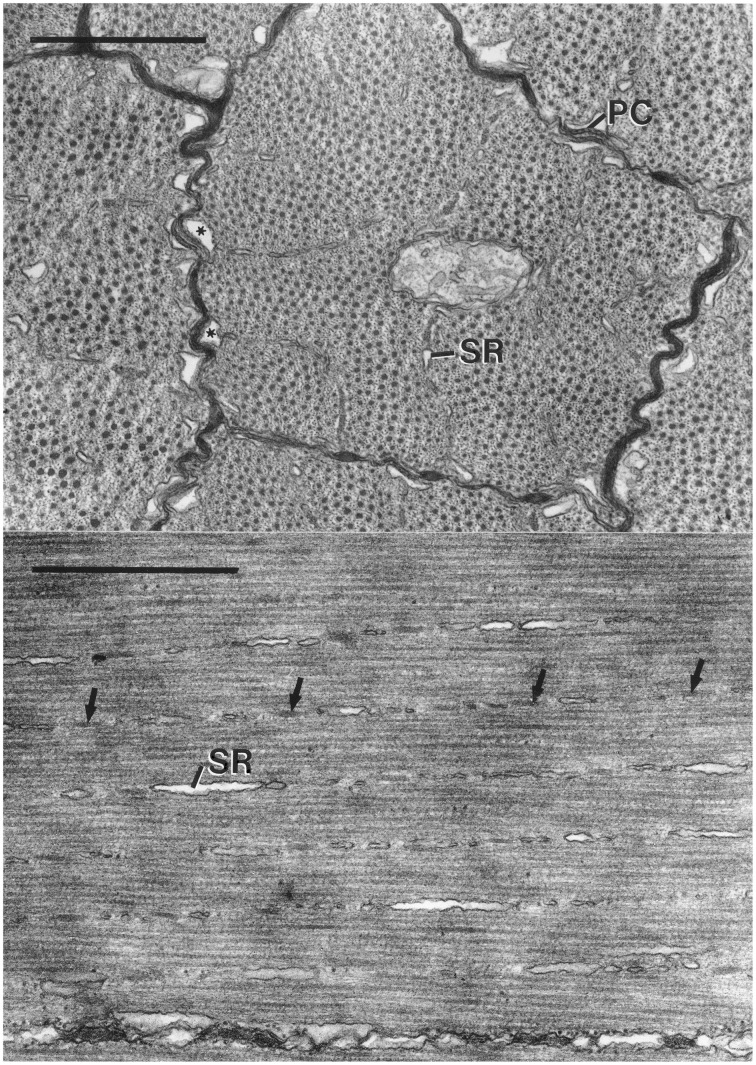
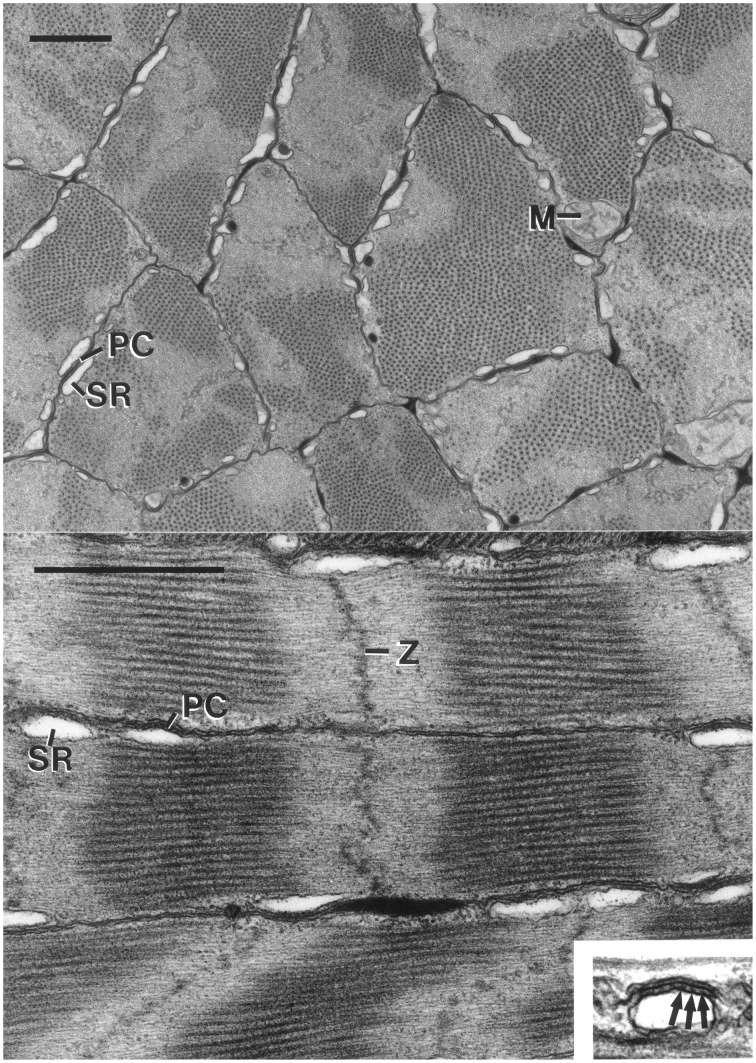
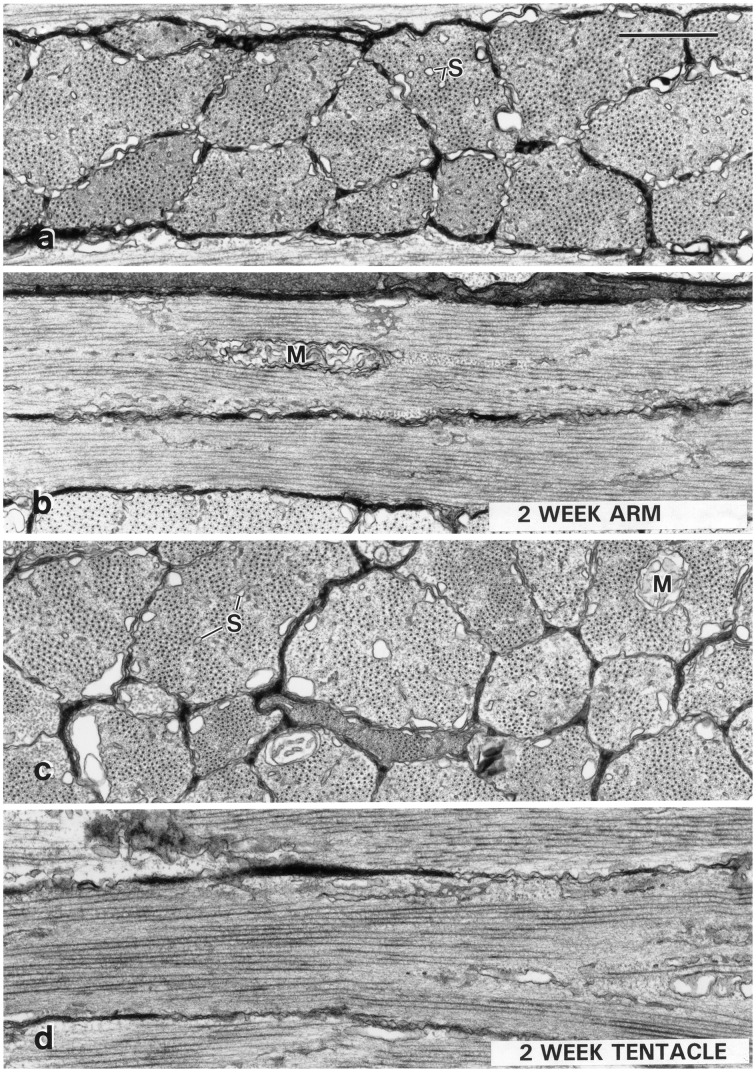
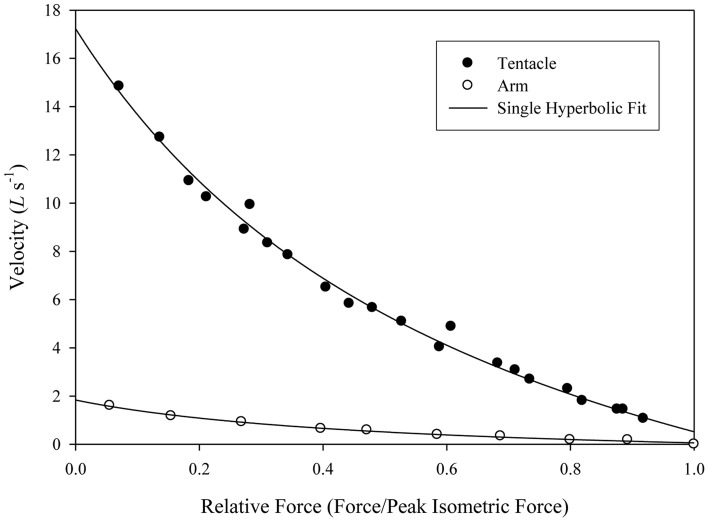
The regeneration of coleoid cephalopod arms and tentacles is a common occurrence, recognized since Aristotle. The complexity of the arrangement of the muscle and connective tissues of these appendages make them of great interest for research on regeneration. They lack rigid skeletal elements and consist of a three-dimensional array of muscle fibers, relying on a type of skeletal support system called a muscular hydrostat. Support and movement in the arms and tentacles depends on the fact that muscle tissue resists volume change. The basic principle of function is straightforward; because the volume of the appendage is essentially constant, a decrease in one dimension must result in an increase in another dimension. Since the muscle fibers are arranged in three mutually perpendicular directions, all three dimensions can be actively controlled and thus a remarkable diversity of movements and deformations can be produced. In the arms and tentacles of coleoids, three main muscle orientations are observed: (1) transverse muscle fibers arranged in planes perpendicular to the longitudinal axis; (2) longitudinal muscle fibers typically arranged in bundles parallel to the longitudinal axis; and (3) helical or obliquely arranged layers of muscle fibers, arranged in both right- and left-handed helixes. By selective activation of these muscle groups, elongation, shortening, bending, torsion and stiffening of the appendage can be produced. The predominant muscle fiber type is obliquely striated. Cross-striated fibers are found only in the transverse muscle mass of the prey capture tentacles of squid and cuttlefish. These fibers have unusually short myofilaments and sarcomeres, generating the high shortening velocity required for rapid elongation of the tentacles. It is likely that coleoid cephalopods use ultrastructural modifications rather than tissue-specific myosin isoforms to tune contraction velocities.
头足类软体动物的腕足和触腕再生是一种常见现象,自亚里士多德时代以来就已被人们所认识。这些附肢的肌肉和结缔组织的排列复杂,因此它们是研究再生的重要对象。它们缺乏刚性的骨骼元素,由三维排列的肌肉纤维组成,依赖于一种称为肌肉液压的骨骼支撑系统。腕足和触腕的支撑和运动依赖于肌肉组织抵抗体积变化的事实。其功能的基本原理很简单;由于附肢的体积基本保持不变,一个维度的减小必然导致另一个维度的增加。由于肌肉纤维以三个相互垂直的方向排列,因此所有三个维度都可以主动控制,从而可以产生非常多样化的运动和变形。在头足类动物的腕足和触腕中,观察到三种主要的肌肉方向:(1)横向肌肉纤维排列在垂直于纵轴的平面上;(2)纵向肌肉纤维通常排列成与纵轴平行的束;(3)螺旋或斜向排列的肌肉纤维层,以右旋和左旋螺旋排列。通过选择性激活这些肌肉群,可以产生腕足的伸长、缩短、弯曲、扭曲和变硬。主要的肌肉纤维类型是斜纹肌。横纹肌纤维仅存在于鱿鱼和乌贼的捕食触腕的横向肌肉块中。这些纤维具有异常短的肌原纤维和肌节,产生触腕快速伸长所需的高缩短速度。头足类软体动物可能使用超微结构的修饰而不是组织特异性肌球蛋白同工型来调节收缩速度。