Liu Jinguo, Luo Yifan, Ju Zhaojie
State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China.
State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China; University of Chinese Academy of Sciences, Beijing 100864, China.
Comput Intell Neurosci. 2016;2016:7845102. doi: 10.1155/2016/7845102. Epub 2016 Apr 11.
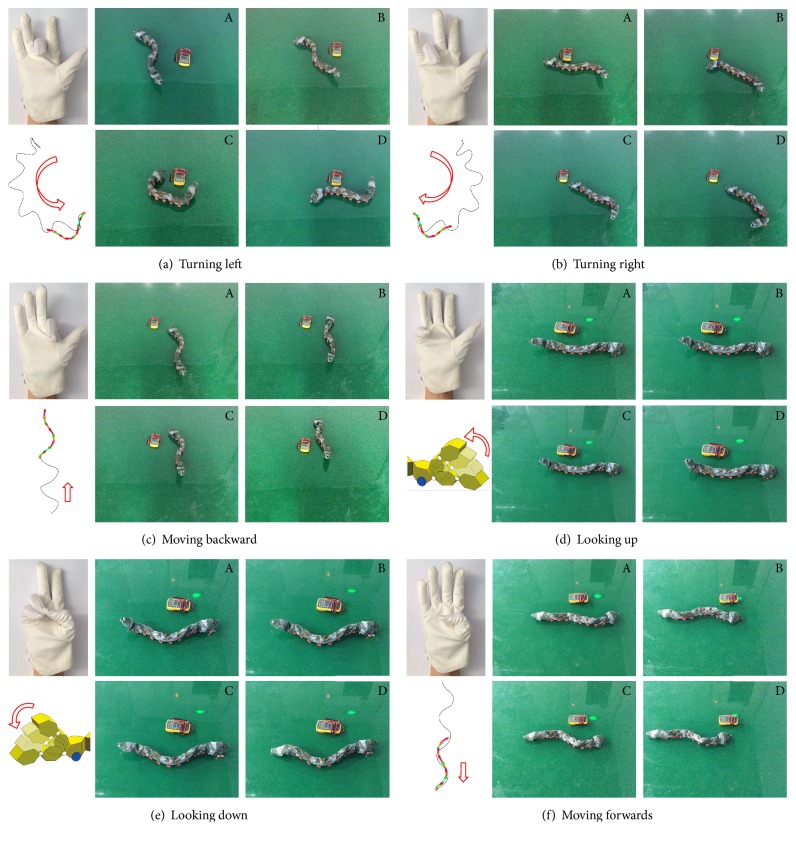
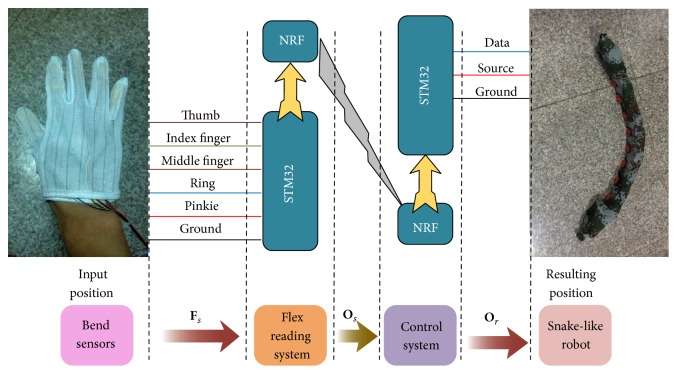
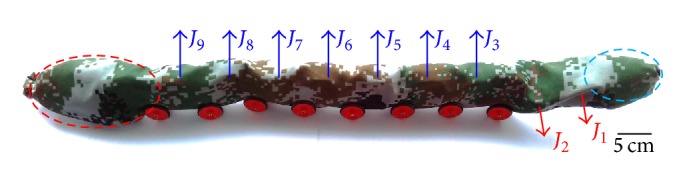
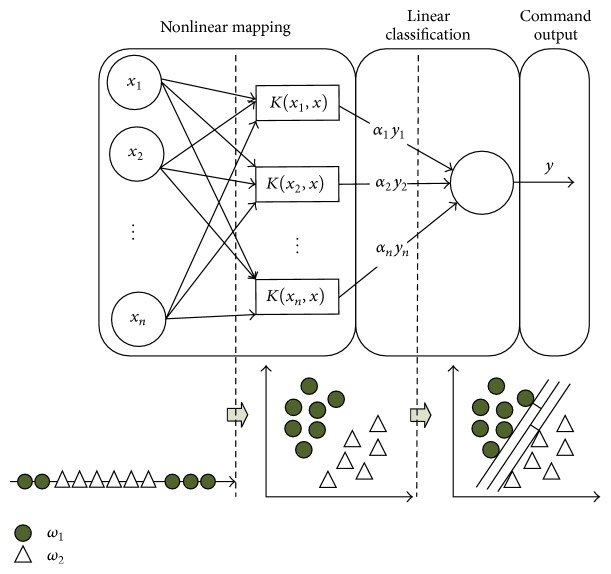
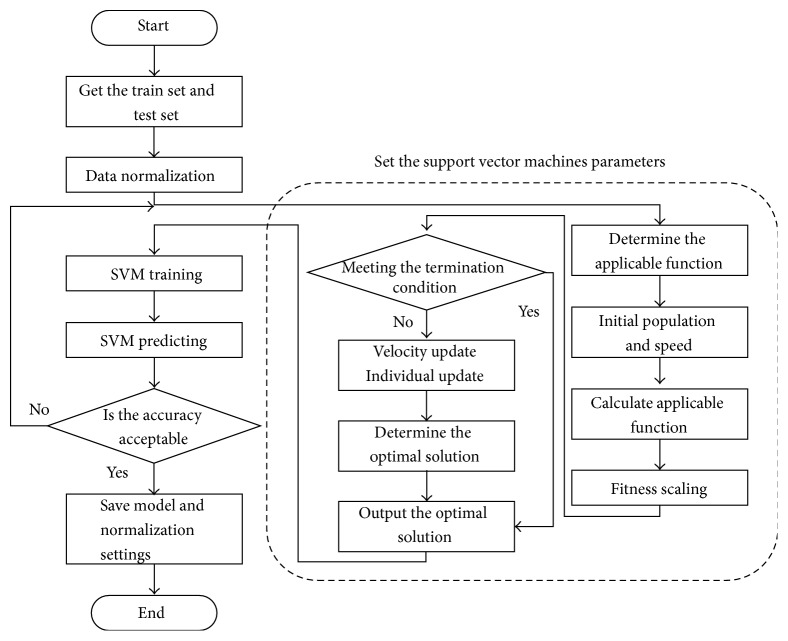
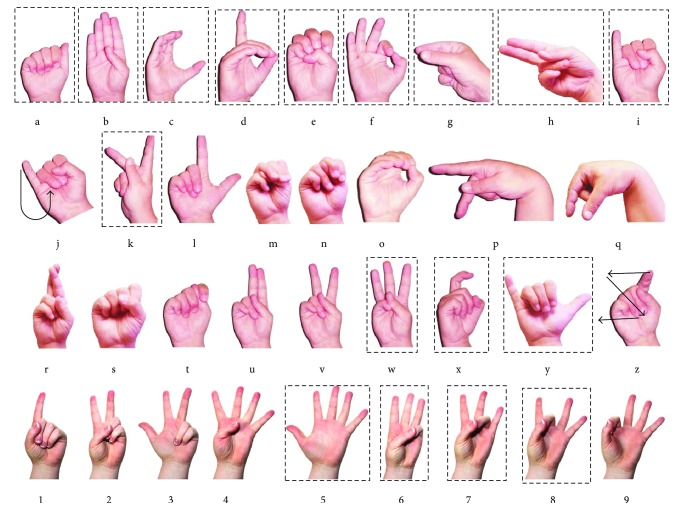
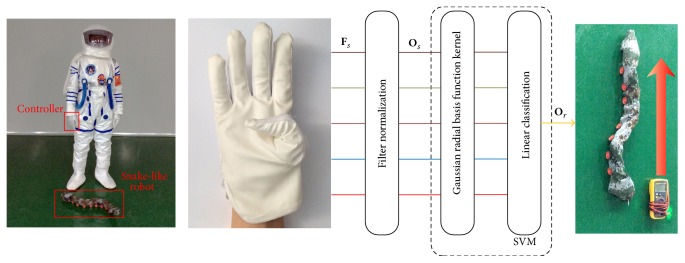
Human-robot interaction (HRI) plays an important role in future planetary exploration mission, where astronauts with extravehicular activities (EVA) have to communicate with robot assistants by speech-type or gesture-type user interfaces embedded in their space suits. This paper presents an interactive astronaut-robot system integrating a data-glove with a space suit for the astronaut to use hand gestures to control a snake-like robot. Support vector machine (SVM) is employed to recognize hand gestures and particle swarm optimization (PSO) algorithm is used to optimize the parameters of SVM to further improve its recognition accuracy. Various hand gestures from American Sign Language (ASL) have been selected and used to test and validate the performance of the proposed system.
人机交互(HRI)在未来的行星探索任务中起着重要作用,在这些任务中,进行舱外活动(EVA)的宇航员必须通过嵌入其太空服的语音型或手势型用户界面与机器人助手进行通信。本文提出了一种交互式宇航员-机器人系统,该系统将数据手套与太空服集成在一起,使宇航员能够使用手势来控制蛇形机器人。采用支持向量机(SVM)对手势进行识别,并使用粒子群优化(PSO)算法对SVM的参数进行优化,以进一步提高其识别准确率。已选择美国手语(ASL)中的各种手势来测试和验证所提出系统的性能。