Marchese Andrew D, Katzschmann Robert K, Rus Daniela
Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology , Cambridge, Massachusetts.
Soft Robot. 2015 Mar 1;2(1):7-25. doi: 10.1089/soro.2014.0022.
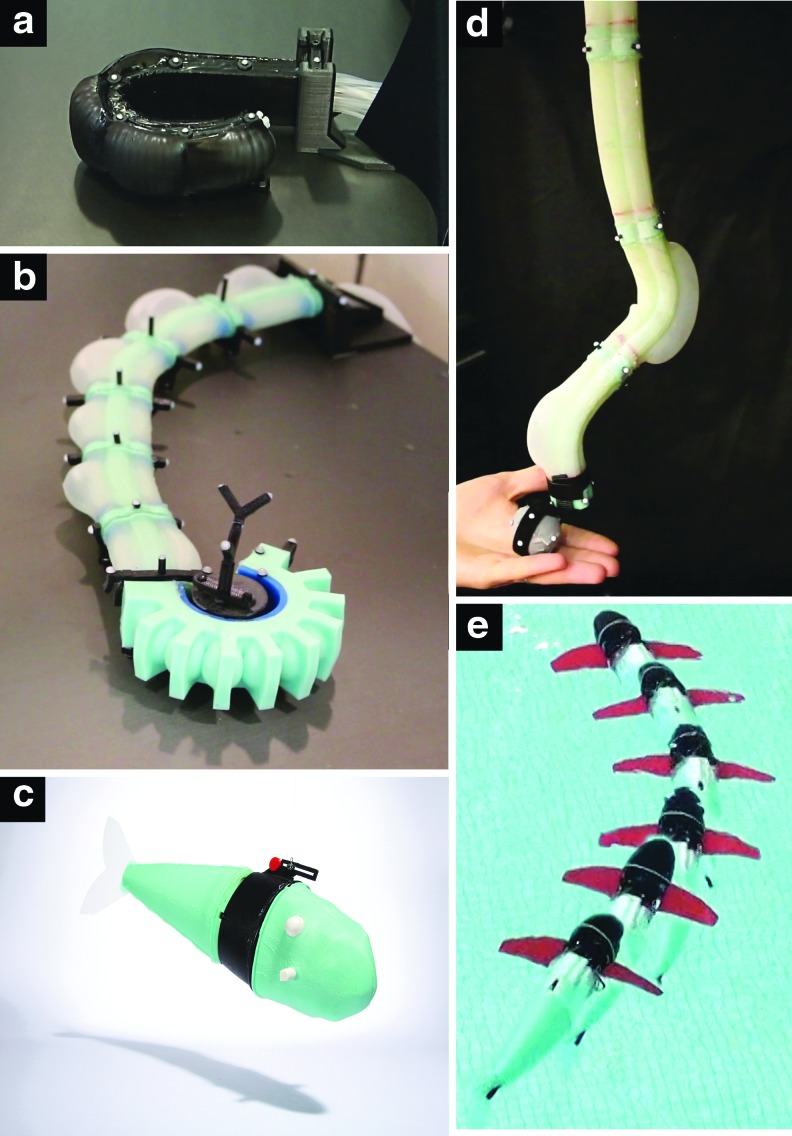
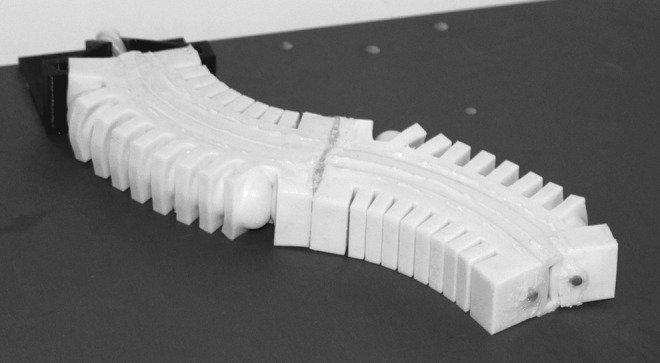
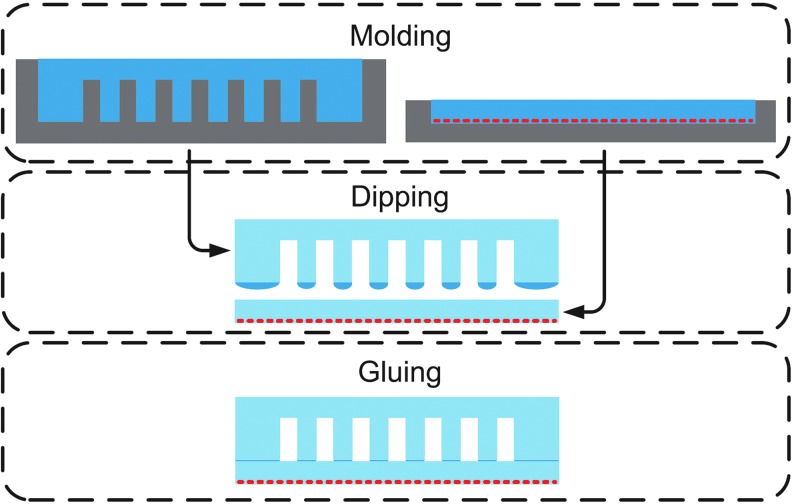
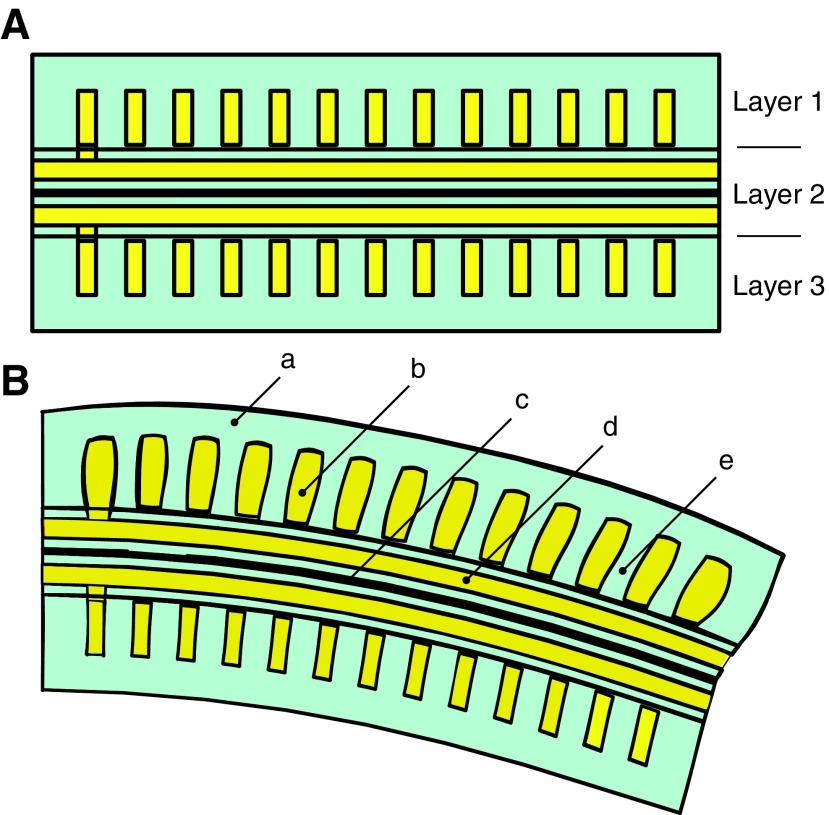
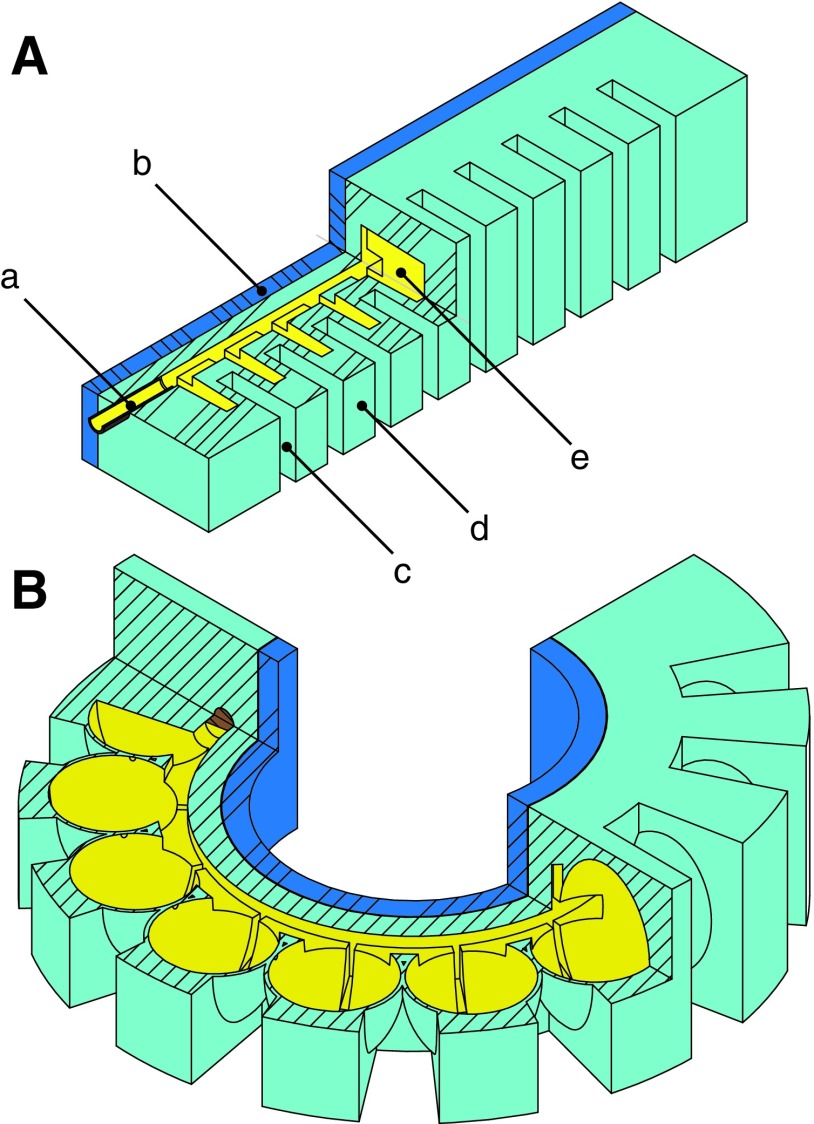
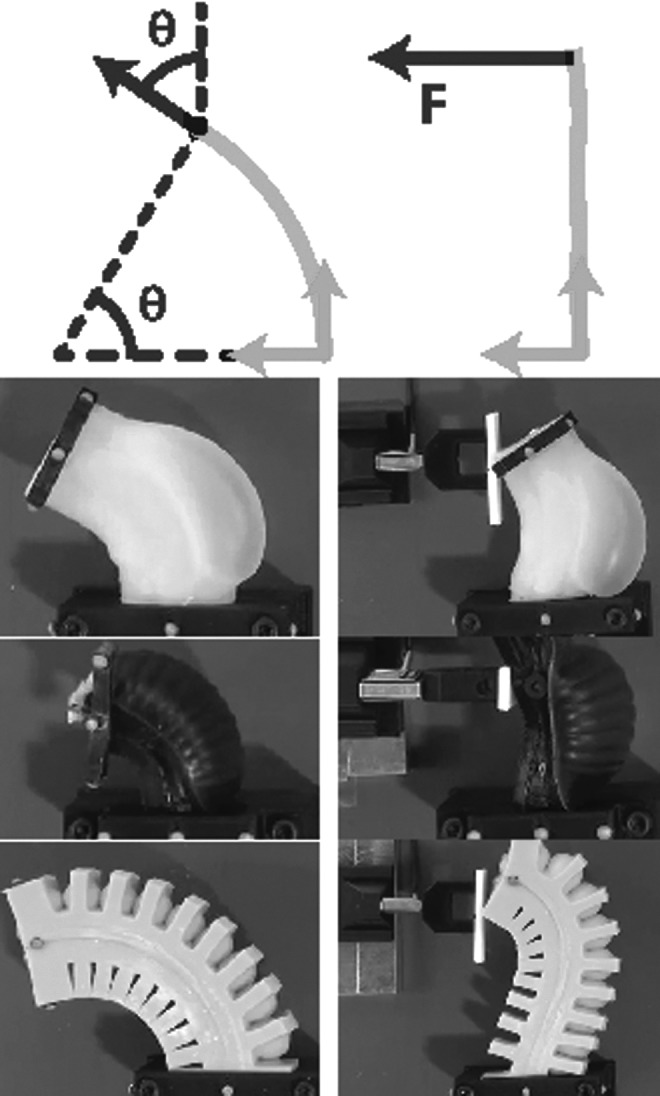
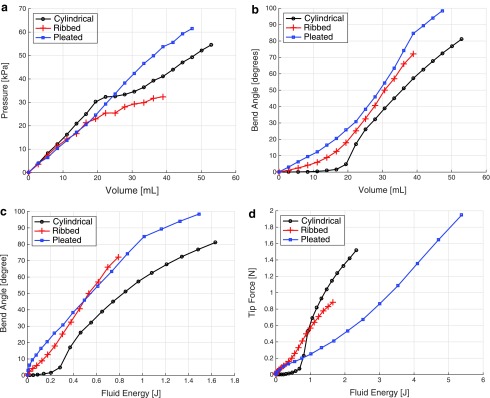
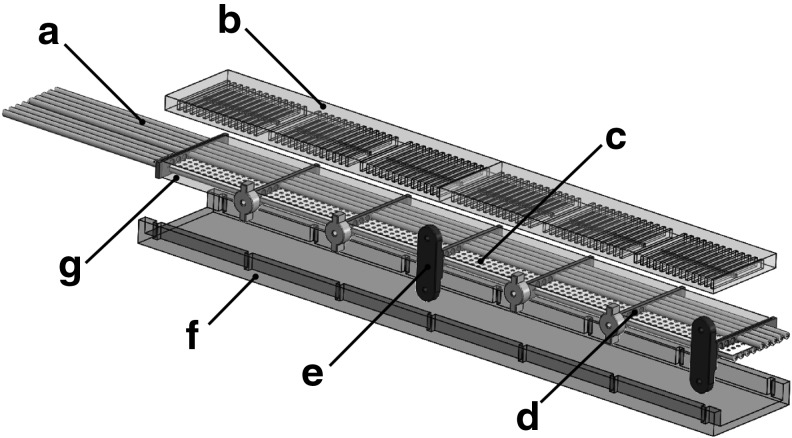
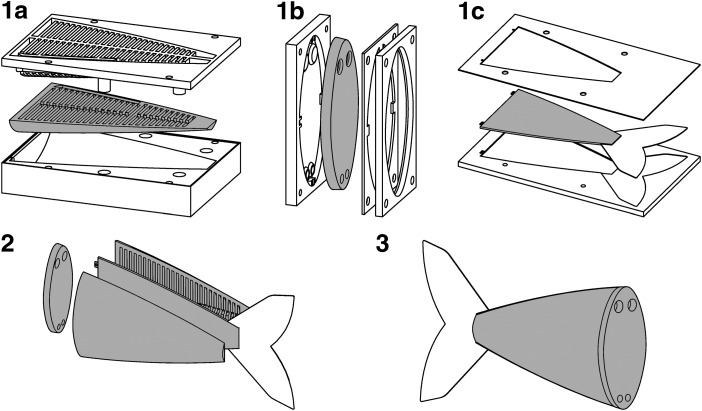
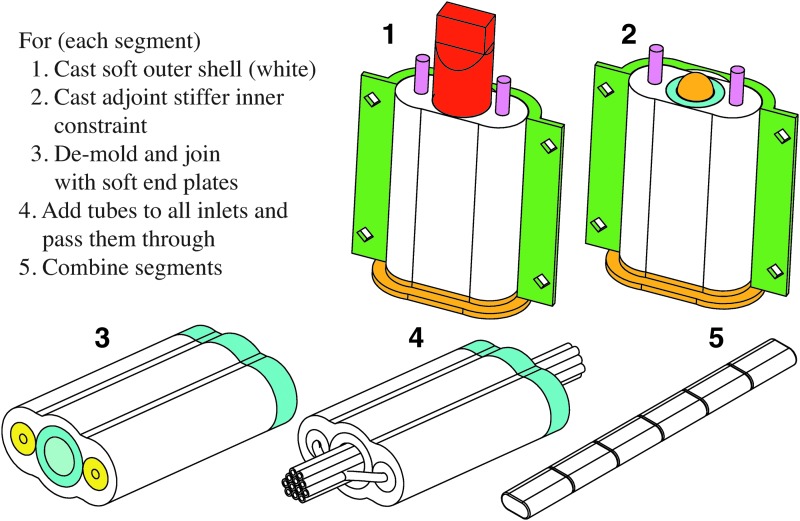
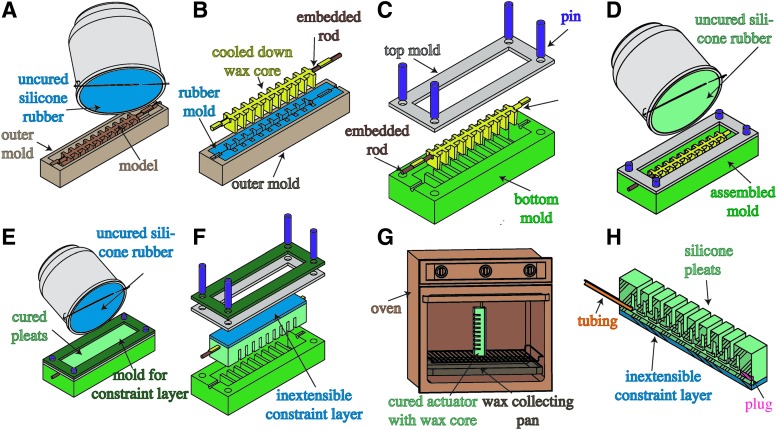
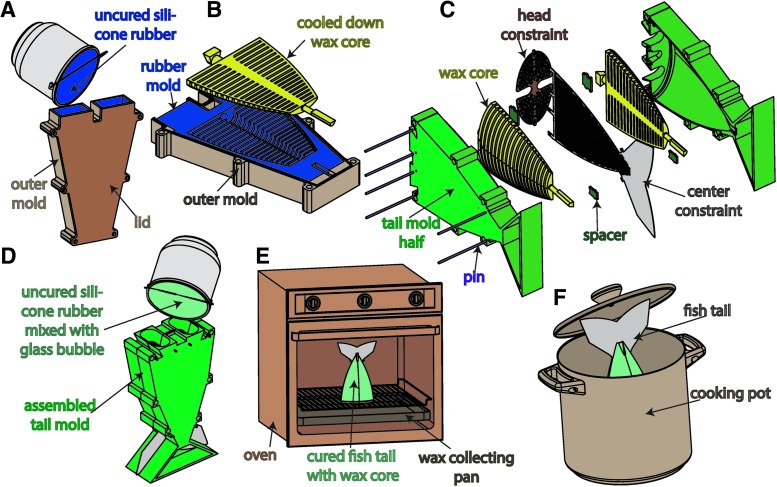
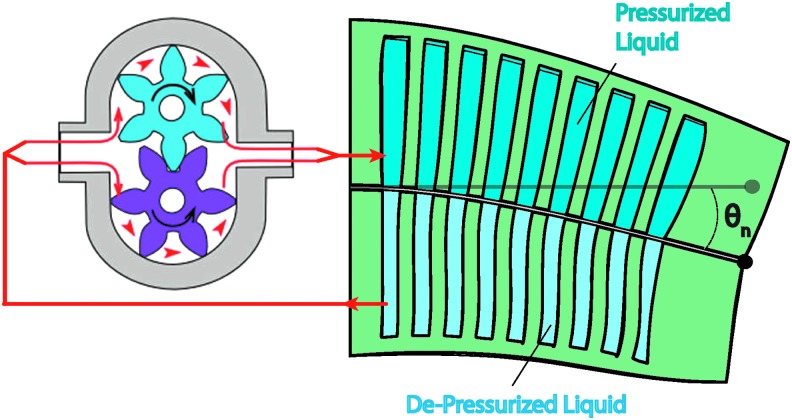
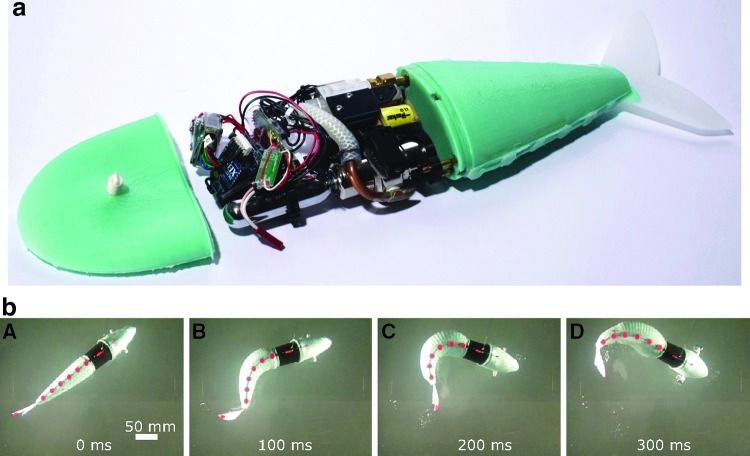
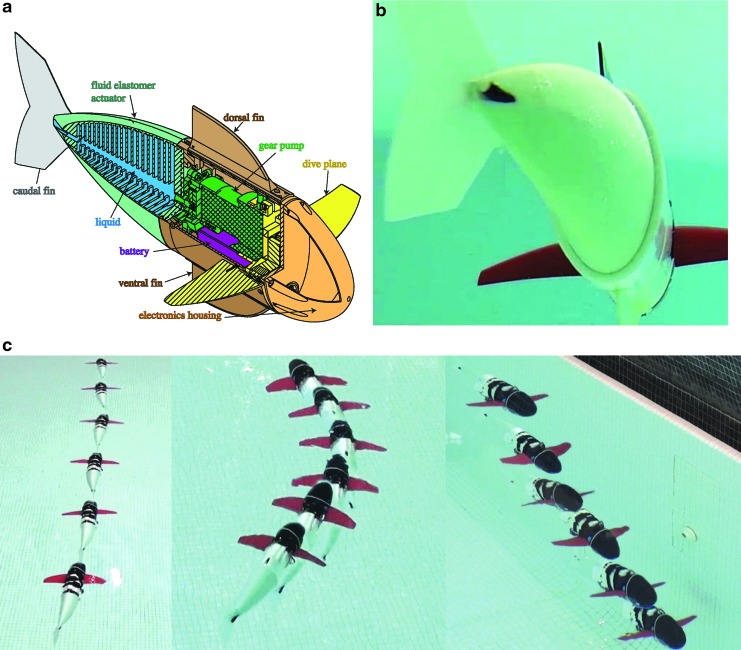
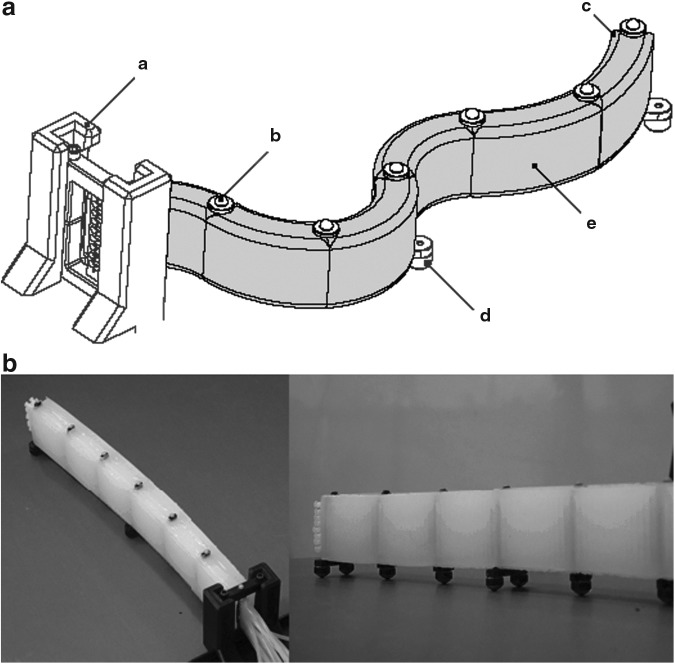
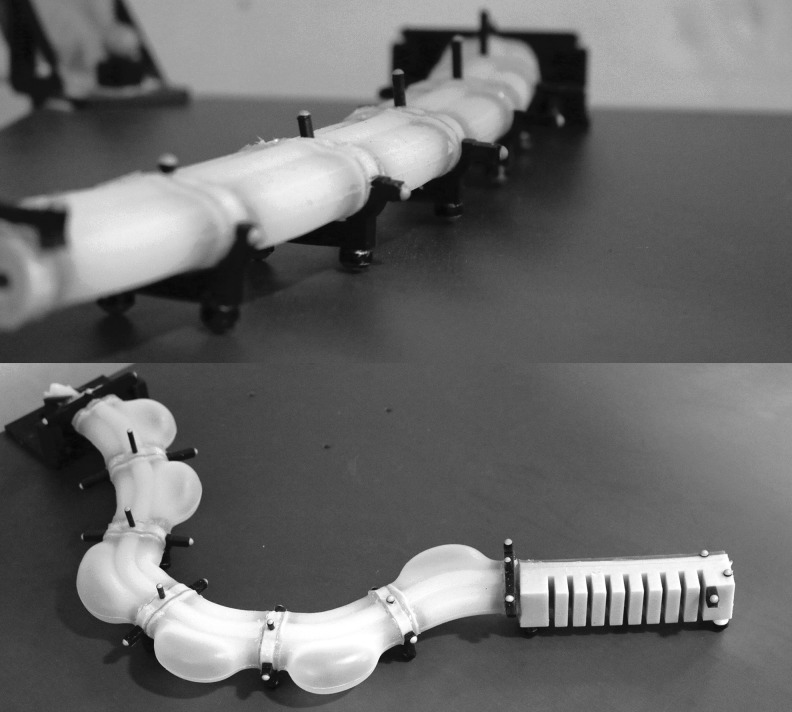
This work provides approaches to designing and fabricating soft fluidic elastomer robots. That is, three viable actuator morphologies composed entirely from soft silicone rubber are explored, and these morphologies are differentiated by their internal channel structure, namely, ribbed, cylindrical, and pleated. Additionally, three distinct casting-based fabrication processes are explored: lamination-based casting, retractable-pin-based casting, and lost-wax-based casting. Furthermore, two ways of fabricating a multiple DOF robot are explored: casting the complete robot as a whole and casting single degree of freedom (DOF) segments with subsequent concatenation. We experimentally validate each soft actuator morphology and fabrication process by creating multiple physical soft robot prototypes.
这项工作提供了设计和制造软流体弹性体机器人的方法。也就是说,探索了三种完全由软硅橡胶组成的可行致动器形态,这些形态通过其内部通道结构来区分,即带肋的、圆柱形的和褶皱的。此外,还探索了三种不同的基于铸造的制造工艺:基于层压的铸造、基于可伸缩销的铸造和基于失蜡法的铸造。此外,还探索了制造多自由度机器人的两种方法:将整个机器人整体铸造以及铸造单自由度(DOF)段并随后进行拼接。我们通过创建多个物理软机器人原型,对每种软致动器形态和制造工艺进行了实验验证。