Brace Natalie L, Hedrick Tyson L, Theriault Diane H, Fuller Nathan W, Wu Zheng, Betke Margrit, Parrish Julia K, Grünbaum Daniel, Morgansen Kristi A
William E. Boeing Department of Aeronautics and Astronautics, University of Washington, Seattle, WA, USA
Department of Biology, University of North Carolina, Chapel Hill, NC, USA.
J R Soc Interface. 2016 Sep;13(122). doi: 10.1098/rsif.2016.0502.
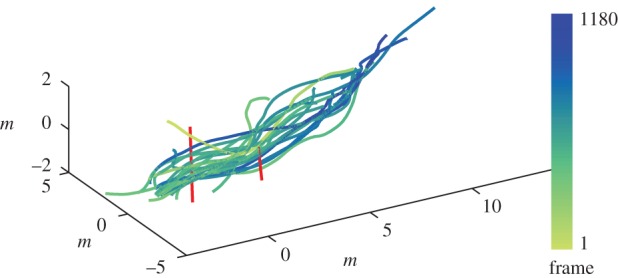
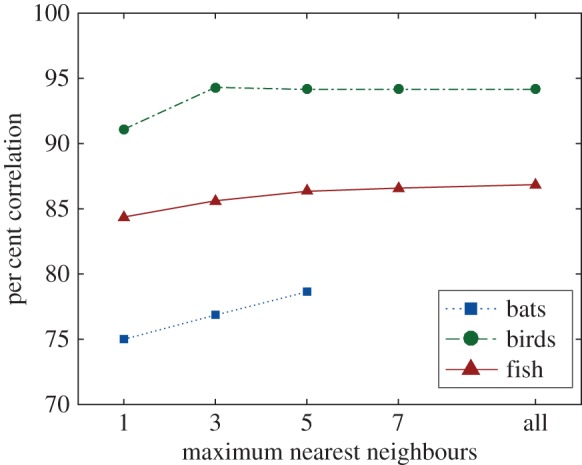
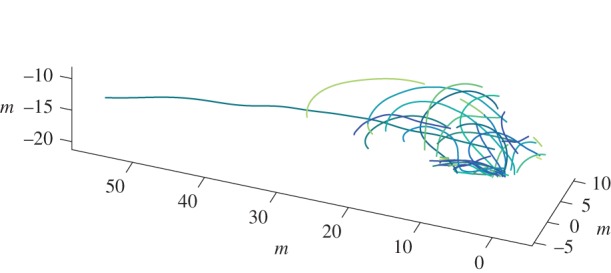
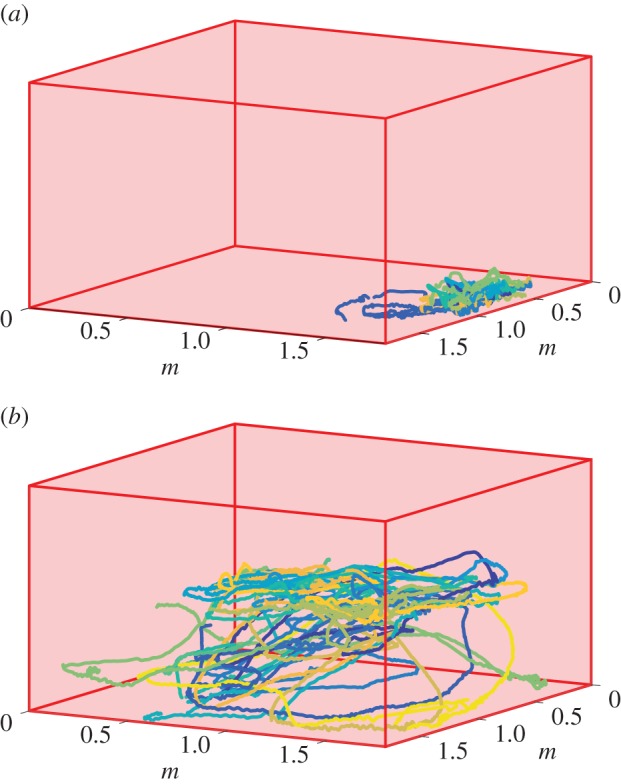
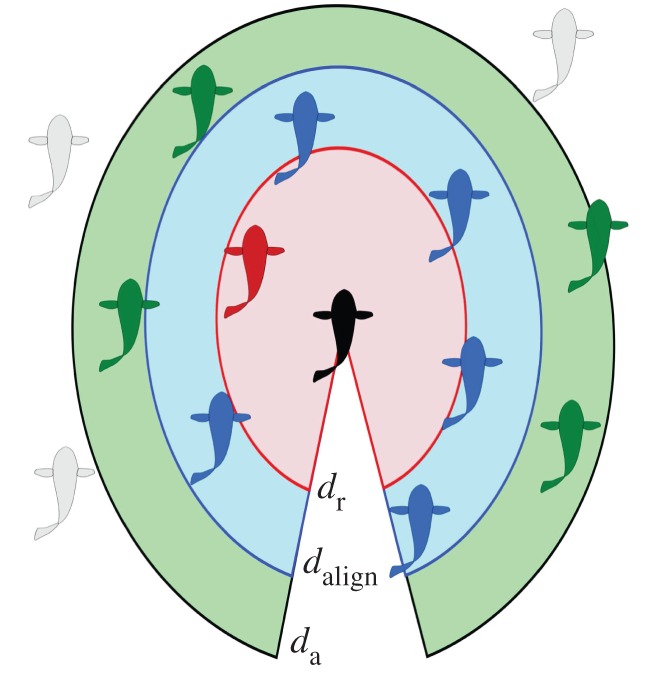
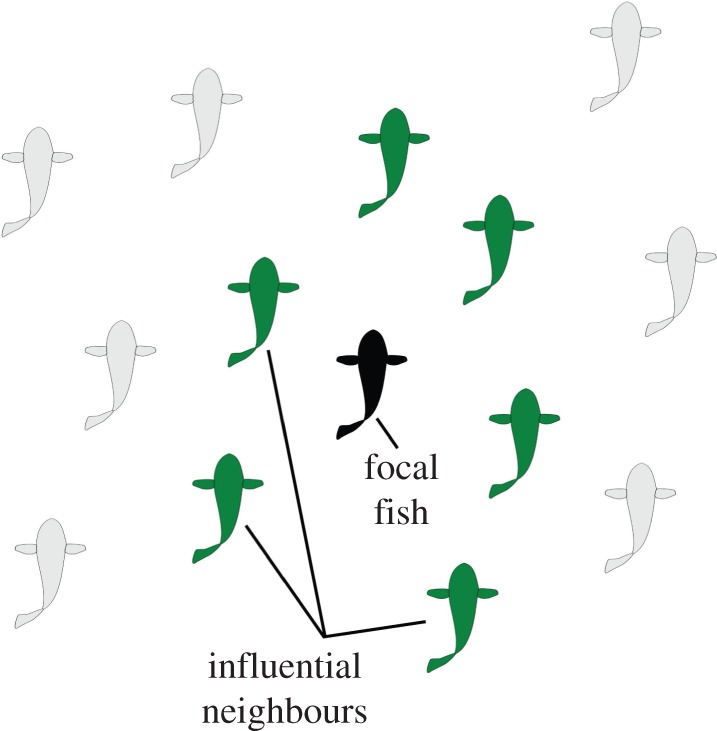
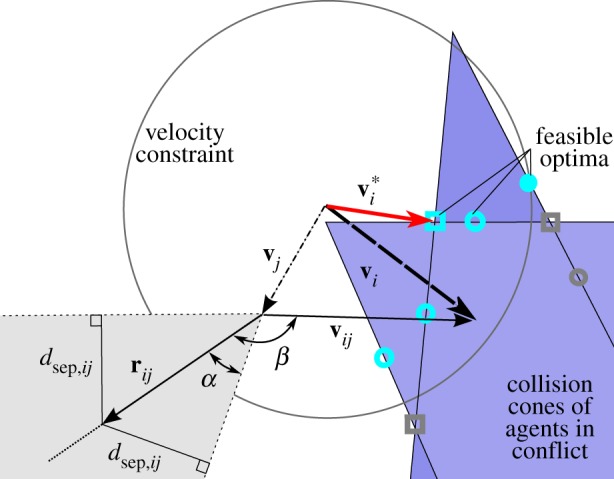
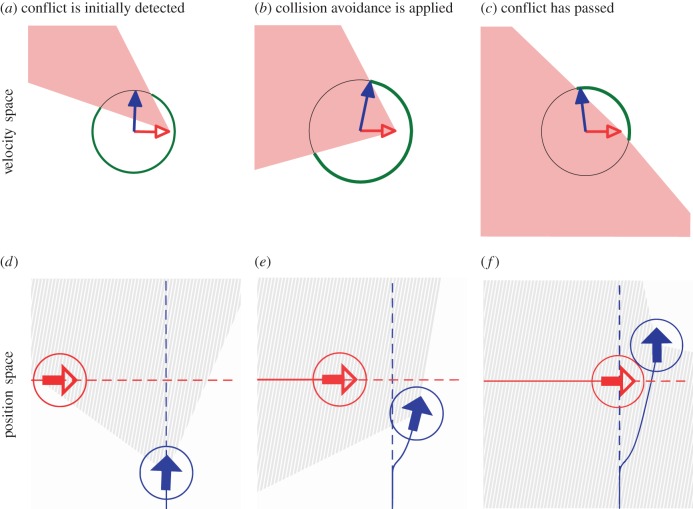
Biological systems consistently outperform autonomous systems governed by engineered algorithms in their ability to reactively avoid collisions. To better understand this discrepancy, a collision avoidance algorithm was applied to frames of digitized video trajectory data from bats, swallows and fish (Myotis velifer, Petrochelidon pyrrhonota and Danio aequipinnatus). Information available from visual cues, specifically relative position and velocity, was provided to the algorithm which used this information to define collision cones that allowed the algorithm to find a safe velocity requiring minimal deviation from the original velocity. The subset of obstacles provided to the algorithm was determined by the animal's sensing range in terms of metric and topological distance. The algorithmic calculated velocities showed good agreement with observed biological velocities, indicating that the algorithm was an informative basis for comparison with the three species and could potentially be improved for engineered applications with further study.
在反应性避撞能力方面,生物系统始终优于由工程算法控制的自主系统。为了更好地理解这种差异,一种避撞算法被应用于蝙蝠、燕子和鱼类(绒毛鼠耳蝠、家燕和斑马鱼)的数字化视频轨迹数据帧。视觉线索提供的信息,特别是相对位置和速度,被提供给该算法,该算法利用这些信息定义碰撞锥,从而使算法能够找到一个与原始速度偏差最小的安全速度。提供给算法的障碍物子集是根据动物在度量和拓扑距离方面的感知范围来确定的。算法计算出的速度与观察到的生物速度显示出良好的一致性,这表明该算法是与这三个物种进行比较的有益基础,并且通过进一步研究有可能在工程应用中得到改进。