Aymerich-Franch Laura, Petit Damien, Kheddar Abderrahmane, Ganesh Gowrishankar
CNRS-AIST Joint Robotics Laboratory (JRL), UMI3218/RL , Tsukuba , Japan.
CNRS-AIST Joint Robotics Laboratory (JRL), UMI3218/RL, Tsukuba, Japan; CNRS-UM LIRMM, Interactive Digital Human group, UMR5506, Montpellier, France.
R Soc Open Sci. 2016 Aug 24;3(8):160407. doi: 10.1098/rsos.160407. eCollection 2016 Aug.
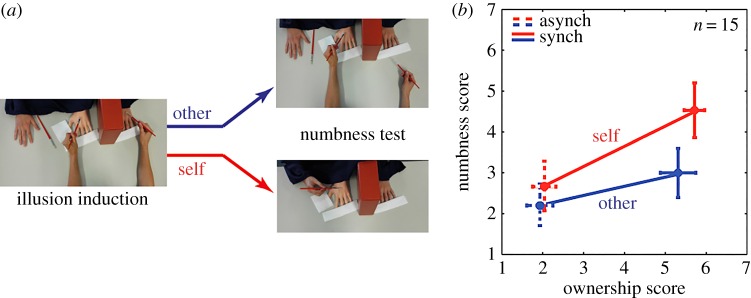
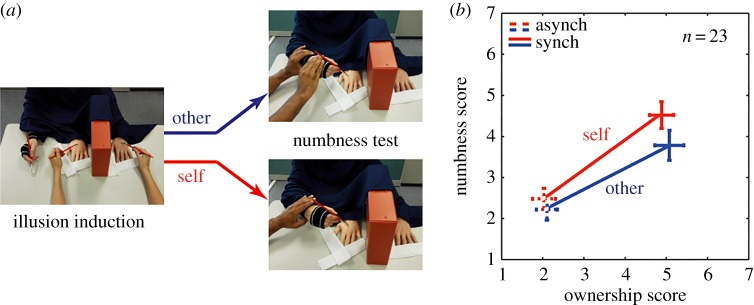
The question of how we attribute observed body parts as our own, and the consequences of this attribution on our sensory-motor processes, is fundamental to understand how our brain distinguishes between self and other. Previous studies have identified interactions between the illusion of ownership, and multi-sensory integration and cross-sensory predictions by the brain. Here we show that illusory ownership additionally modifies the motor-sensory predictions by the brain. In our preliminary experiments, we observed a new numbness illusion following the classical rubber-hand illusion (RHI); brushing only the rubber hand after induction of the RHI results in illusory numbness in one's real hand. Previous studies have shown that self-generated actions (like tickling) are attenuated by motor-sensory predictions by the so-called . Motivated by this finding, here we examined whether the numbness illusion after the RHI is different when the rubber hand is brushed oneself, compared with when the brushing is performed by another. We observed that, all other conditions remaining the same, haptic perception in the real hand was lower (numbness higher) during self-generated brushing. Our result suggests that RHI reorganizes the forward model, such that we predict haptic consequences of self-generated motor actions on the rubber hand.
我们如何将观察到的身体部位归为自己所有,以及这种归属对我们的感觉运动过程产生的影响,是理解我们的大脑如何区分自我与他人的关键问题。先前的研究已经确定了所有权错觉与大脑的多感官整合和跨感官预测之间的相互作用。在这里,我们表明,错觉性所有权还会改变大脑的运动感觉预测。在我们的初步实验中,我们在经典的橡皮手错觉(RHI)之后观察到一种新的麻木错觉;在诱发RHI后仅刷橡皮手会导致真实手部产生错觉性麻木。先前的研究表明,自我产生的动作(如挠痒痒)会被所谓的运动感觉预测减弱。受这一发现的启发,在这里我们研究了与由他人进行刷动相比,当自己刷橡皮手时,RHI后的麻木错觉是否有所不同。我们观察到,在所有其他条件保持不变的情况下,自我产生刷动时真实手部的触觉感知较低(麻木感更强)。我们的结果表明,RHI会重新组织前向模型,从而使我们预测自我产生的运动动作在橡皮手上的触觉后果。