Rutzinger Martin, Höfle Bernhard, Hollaus Markus, Pfeifer Norbert
alpS - Centre for Natural Hazard Management, Grabenweg 3, A-6020 Innsbruck, Austria.
Institute of Geography, University of Innsbruck, Innrain 52, A-6020 Innsbruck, Austria.
Sensors (Basel). 2008 Aug 4;8(8):4505-4528. doi: 10.3390/s8084505.
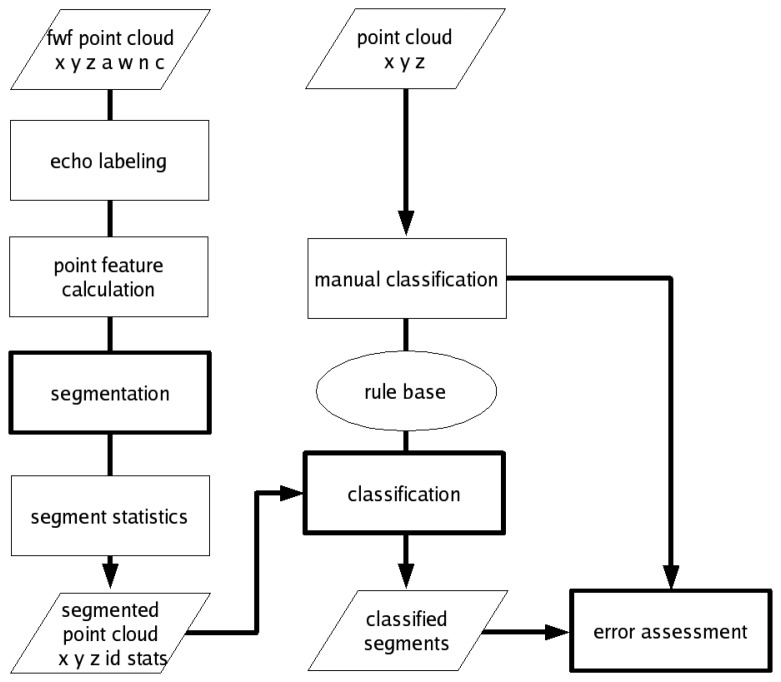
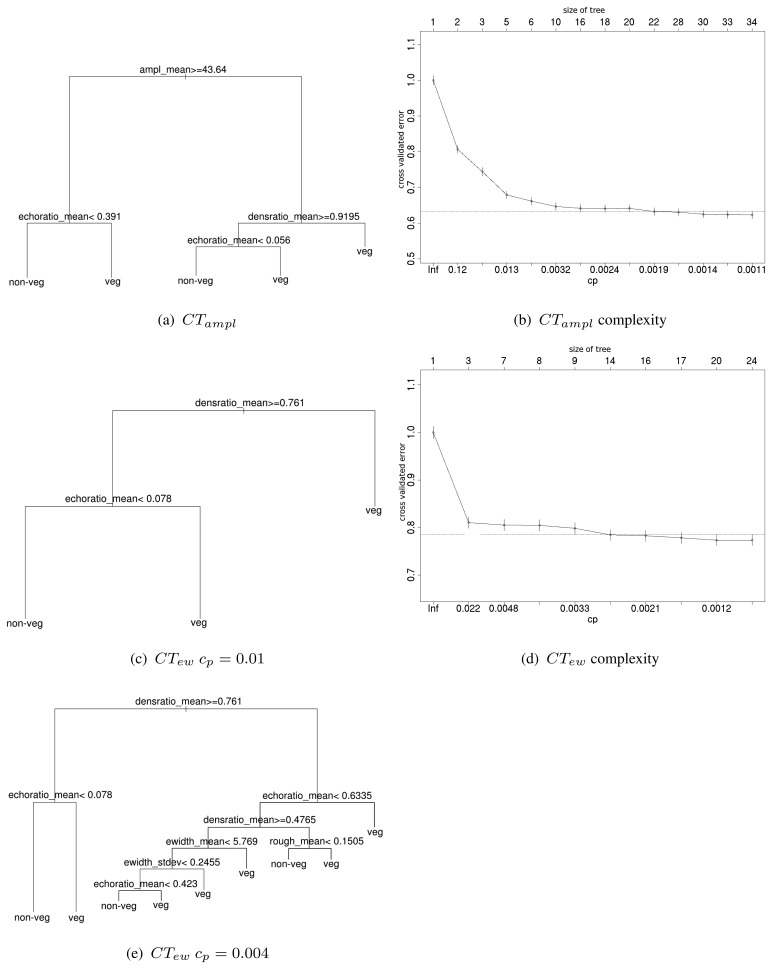
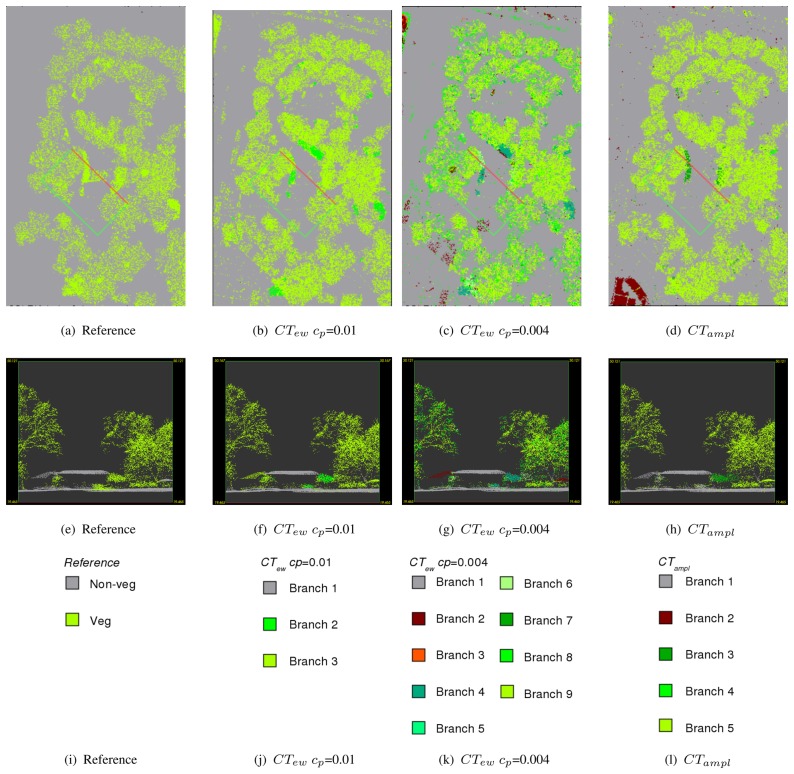
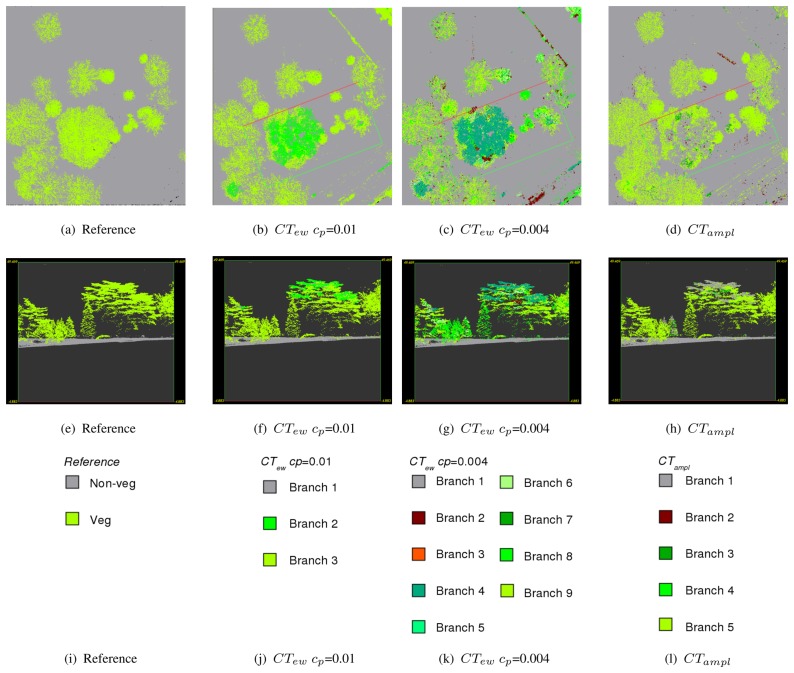
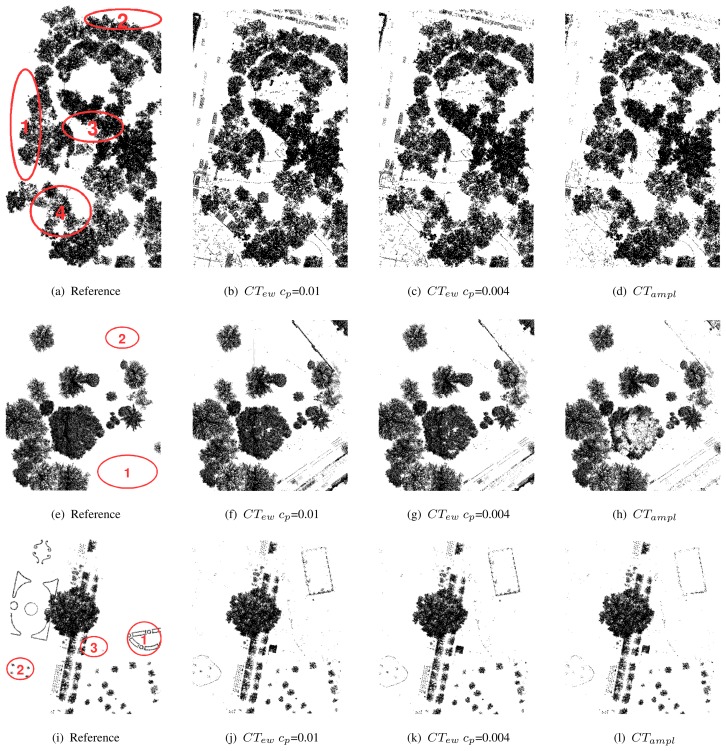
Airborne laser scanning (ALS) is a remote sensing technique well-suited for 3D vegetation mapping and structure characterization because the emitted laser pulses are able to penetrate small gaps in the vegetation canopy. The backscattered echoes from the foliage, woody vegetation, the terrain, and other objects are detected, leading to a cloud of points. Higher echo densities (> 20 echoes/m2) and additional classification variables from full-waveform (FWF) ALS data, namely echo amplitude, echo width and information on multiple echoes from one shot, offer new possibilities in classifying the ALS point cloud. Currently FWF sensor information is hardly used for classification purposes. This contribution presents an object-based point cloud analysis (OBPA) approach, combining segmentation and classification of the 3D FWF ALS points designed to detect tall vegetation in urban environments. The definition tall vegetation includes trees and shrubs, but excludes grassland and herbage. In the applied procedure FWF ALS echoes are segmented by a seeded region growing procedure. All echoes sorted descending by their surface roughness are used as seed points. Segments are grown based on echo width homogeneity. Next, segment statistics (mean, standard deviation, and coefficient of variation) are calculated by aggregating echo features such as amplitude and surface roughness. For classification a rule base is derived automatically from a training area using a statistical classification tree. To demonstrate our method we present data of three sites with around 500,000 echoes each. The accuracy of the classified vegetation segments is evaluated for two independent validation sites. In a point-wise error assessment, where the classification is compared with manually classified 3D points, completeness and correctness better than 90% are reached for the validation sites. In comparison to many other algorithms the proposed 3D point classification works on the original measurements directly, i.e. the acquired points. Gridding of the data is not necessary, a process which is inherently coupled to loss of data and precision. The 3D properties provide especially a good separability of buildings and terrain points respectively, if they are occluded by vegetation.
机载激光扫描(ALS)是一种非常适合三维植被测绘和结构特征描述的遥感技术,因为发射的激光脉冲能够穿透植被冠层中的小间隙。可以检测到来自树叶、木本植被、地形及其他物体的后向散射回波,从而形成点云。来自全波形(FWF)ALS数据的更高回波密度(>20个回波/平方米)以及其他分类变量,即回波幅度、回波宽度和单次发射的多次回波信息,为ALS点云分类提供了新的可能性。目前,FWF传感器信息几乎未用于分类目的。本文提出了一种基于对象的点云分析(OBPA)方法,该方法结合了三维FWF ALS点的分割和分类,旨在检测城市环境中的高大植被。高大植被的定义包括树木和灌木,但不包括草地和草本植物。在所应用的过程中,FWF ALS回波通过种子区域生长过程进行分割。所有按表面粗糙度降序排序的回波用作种子点。基于回波宽度均匀性生长片段。接下来,通过聚合诸如幅度和表面粗糙度等回波特征来计算片段统计量(均值、标准差和变异系数)。对于分类,使用统计分类树从训练区域自动导出规则库。为了演示我们的方法,我们展示了三个站点的数据,每个站点约有50万个回波。针对两个独立的验证站点评估分类植被片段的准确性。在逐点误差评估中,将分类结果与手动分类的三维点进行比较,验证站点的完整性和正确性均达到了90%以上。与许多其他算法相比,所提出的三维点分类直接对原始测量数据(即采集到的点)进行处理。无需对数据进行网格化处理,而网格化过程本身会导致数据丢失和精度损失。三维属性尤其能在建筑物和地形点被植被遮挡时,分别提供良好的可分离性。