Department of Electrical and Systems Engineering, School of Engineering and Applied Science, University of Pennsylvania, Philadelphia, Pennsylvania 19104, USA.
Center for Complex Network Research and Departments of Physics, Computer Science and Biology, Northeastern University, Boston, Massachusetts 02115, USA.
Sci Rep. 2017 Jan 5;7:39978. doi: 10.1038/srep39978.
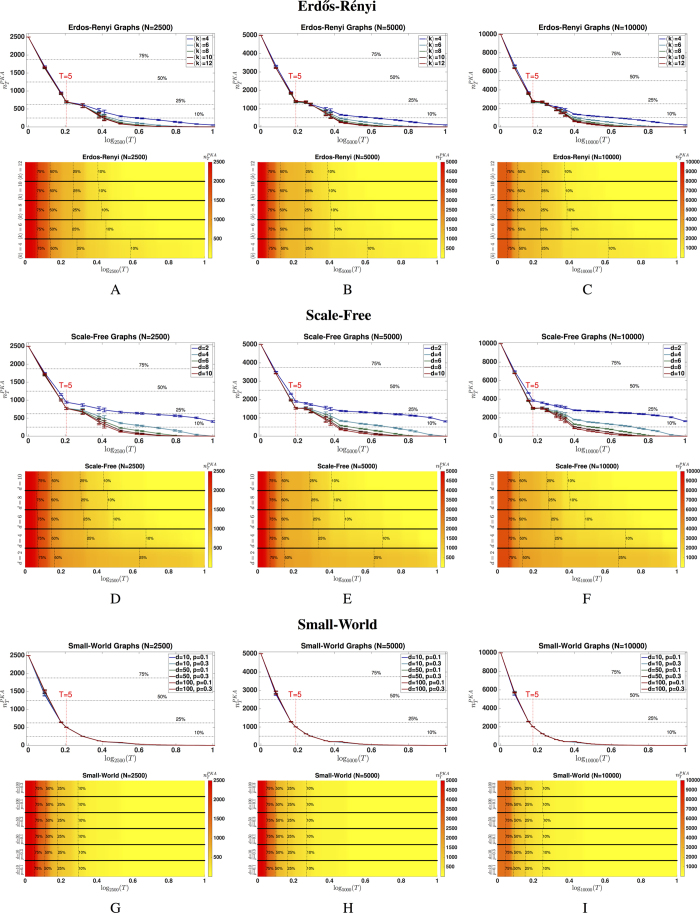
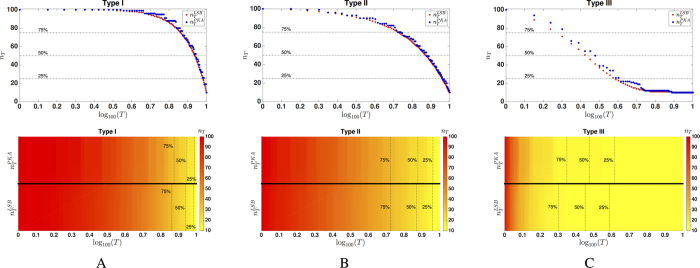
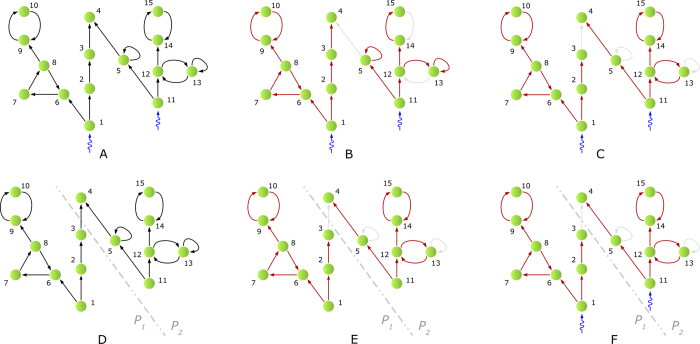
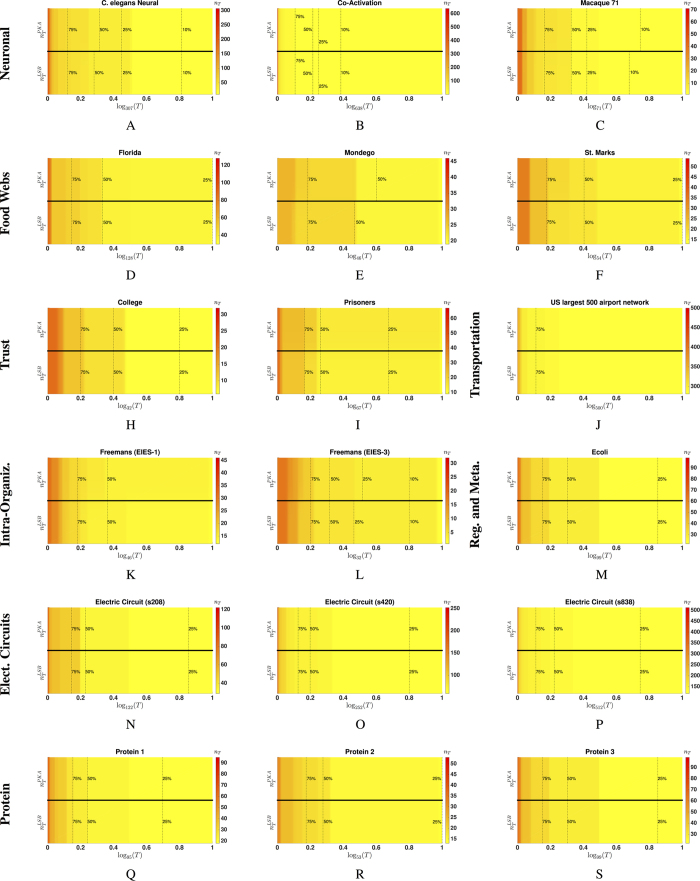
Recent advances in control theory provide us with efficient tools to determine the minimum number of driving (or driven) nodes to steer a complex network towards a desired state. Furthermore, we often need to do it within a given time window, so it is of practical importance to understand the trade-offs between the minimum number of driving/driven nodes and the minimum time required to reach a desired state. Therefore, we introduce the notion of actuation spectrum to capture such trade-offs, which we used to find that in many complex networks only a small fraction of driving (or driven) nodes is required to steer the network to a desired state within a relatively small time window. Furthermore, our empirical studies reveal that, even though synthetic network models are designed to present structural properties similar to those observed in real networks, their actuation spectra can be dramatically different. Thus, it supports the need to develop new synthetic network models able to replicate controllability properties of real-world networks.
最近控制理论的进展为我们提供了有效的工具,以确定将复杂网络引导至期望状态所需的最少驱动(或受驱)节点数。此外,我们通常需要在给定的时间窗口内完成,因此,理解驱动/受驱节点的最小数量与达到期望状态所需的最小时间之间的权衡关系具有实际意义。因此,我们引入了作用谱的概念来捕捉这种权衡关系,并用它来发现,在许多复杂网络中,只需少量的驱动(或受驱)节点,就可以在相对较小的时间窗口内将网络引导至期望状态。此外,我们的实证研究表明,即使合成网络模型被设计为呈现出与实际网络中观察到的结构特性相似的特性,它们的作用谱也可能有很大的不同。因此,这支持了开发新的合成网络模型的需求,以复制现实网络的可控性特性。