Division PMA, Department of Mechanical Engineering, Katholieke Universiteit Leuven, 3000 Leuven, Belgium.
Department of Biomedical Kinesiology, Katholieke Universiteit Leuven, 3000 Leuven, Belgium.
Sensors (Basel). 2017 Mar 24;17(4):671. doi: 10.3390/s17040671.
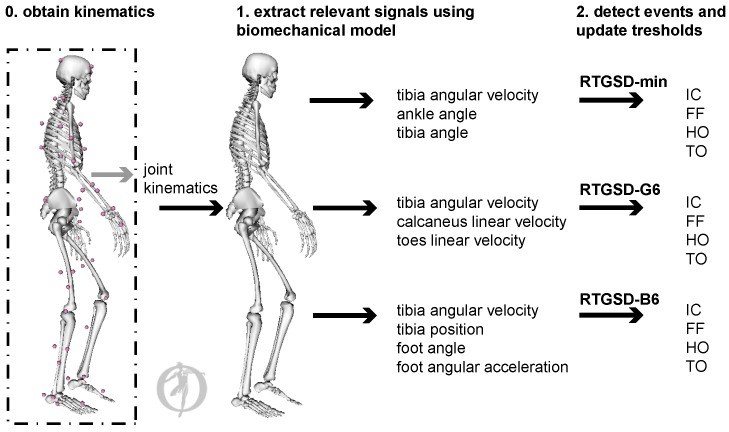
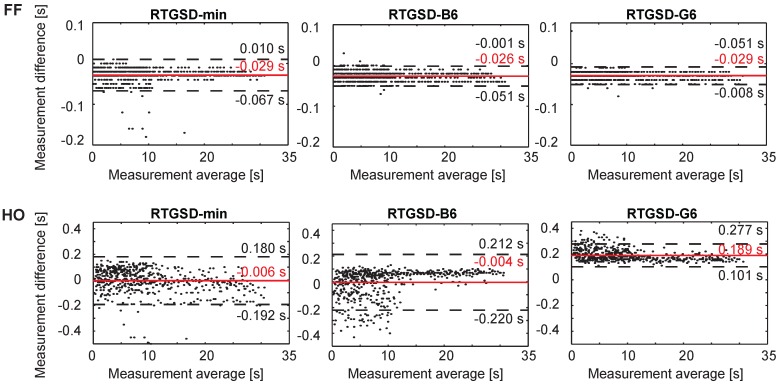
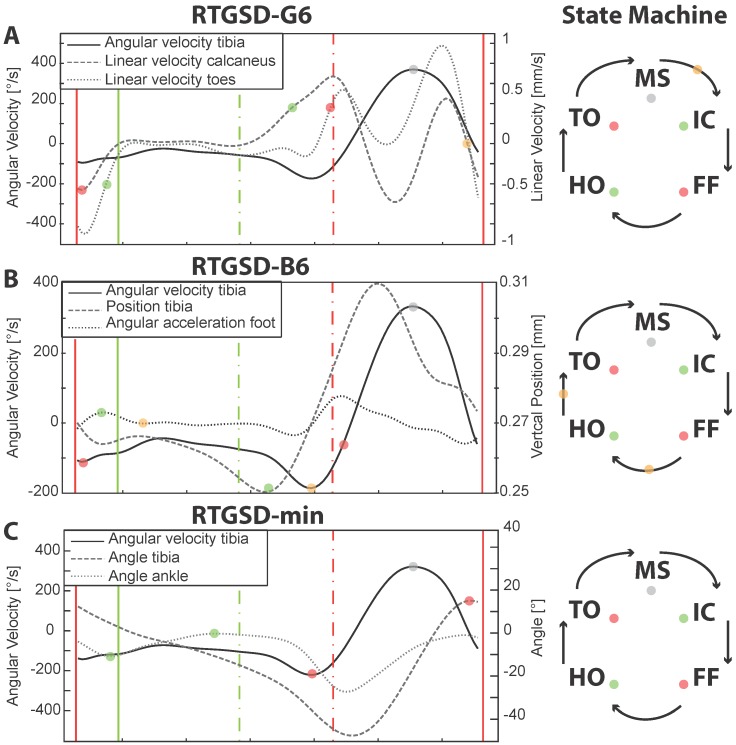
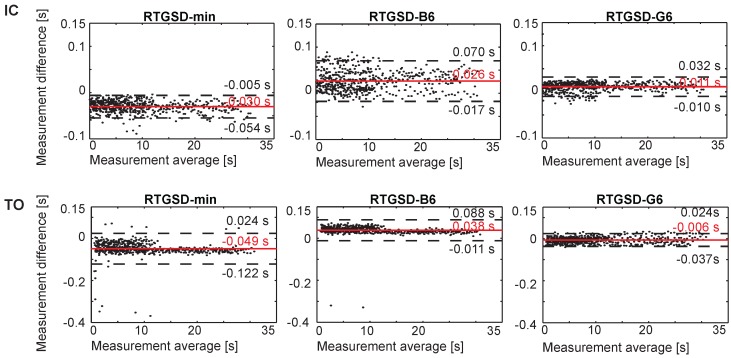
Real-time detection of multiple stance events, more specifically initial contact (IC), foot flat (FF), heel off (HO), and toe off (TO), could greatly benefit neurorobotic (NR) and neuroprosthetic (NP) control. Three real-time threshold-based algorithms have been developed, detecting the aforementioned events based on kinematic data in combination with a biomechanical model. Data from seven subjects walking at three speeds on an instrumented treadmill were used to validate the presented algorithms, accumulating to a total of 558 steps. The reference for the gait events was obtained using marker and force plate data. All algorithms had excellent precision and no false positives were observed. Timing delays of the presented algorithms were similar to current state-of-the-art algorithms for the detection of IC and TO, whereas smaller delays were achieved for the detection of FF. Our results indicate that, based on their high precision and low delays, these algorithms can be used for the control of an NR/NP, with the exception of the HO event. Kinematic data is used in most NR/NP control schemes and is thus available at no additional cost, resulting in a minimal computational burden. The presented methods can also be applied for screening pathological gait or gait analysis in general in/outside of the laboratory.
实时检测多种姿势事件,特别是初始接触(IC)、足底平(FF)、脚跟离地(HO)和脚趾离地(TO),可以极大地受益于神经机器人(NR)和神经假体(NP)控制。已经开发了三种基于实时阈值的算法,这些算法根据运动学数据结合生物力学模型来检测上述事件。使用仪器化跑步机上 7 名受试者以三种速度行走的数据来验证所提出的算法,共积累了 558 步。步态事件的参考是使用标记和力板数据获得的。所有算法都具有出色的精度,没有观察到假阳性。所提出算法的时间延迟与当前用于检测 IC 和 TO 的最先进算法相似,而用于检测 FF 的延迟较小。我们的结果表明,基于其高精度和低延迟,这些算法可用于 NR/NP 的控制,HO 事件除外。运动学数据用于大多数 NR/NP 控制方案中,因此无需额外成本,从而产生最小的计算负担。所提出的方法也可用于在实验室内外进行病理步态筛查或一般步态分析。