Department of Electrical and Computer Engineering, University of British Columbia, Vancouver, British Columbia V6T1Z4, Canada.
Sci Adv. 2017 Mar 15;3(3):e1602200. doi: 10.1126/sciadv.1602200. eCollection 2017 Mar.
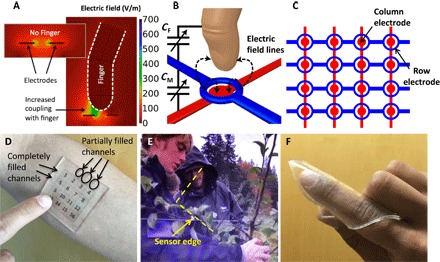
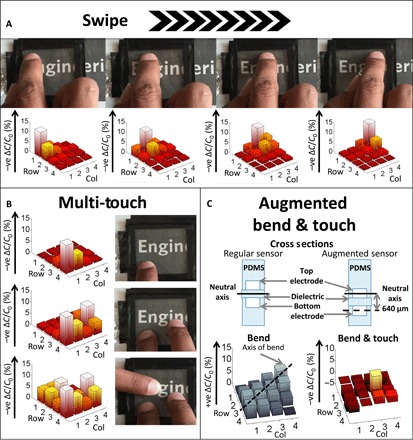
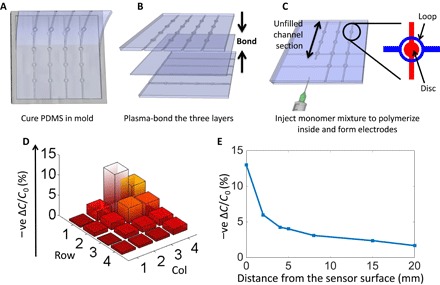
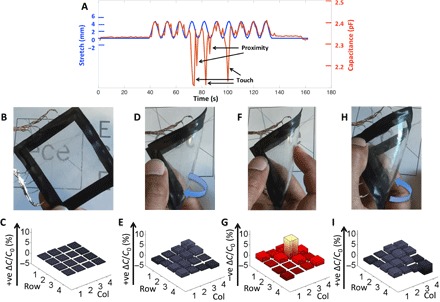
The development of bendable, stretchable, and transparent touch sensors is an emerging technological goal in a variety of fields, including electronic skin, wearables, and flexible handheld devices. Although transparent tactile sensors based on metal mesh, carbon nanotubes, and silver nanowires demonstrate operation in bent configurations, we present a technology that extends the operation modes to the sensing of finger proximity including light touch during active bending and even stretching. This is accomplished using stretchable and ionically conductive hydrogel electrodes, which project electric field above the sensor to couple with and sense a finger. The polyacrylamide electrodes are embedded in silicone. These two widely available, low-cost, transparent materials are combined in a three-step manufacturing technique that is amenable to large-area fabrication. The approach is demonstrated using a proof-of-concept 4 × 4 cross-grid sensor array with a 5-mm pitch. The approach of a finger hovering a few centimeters above the array is readily detectable. Light touch produces a localized decrease in capacitance of 15%. The movement of a finger can be followed across the array, and the location of multiple fingers can be detected. Touch is detectable during bending and stretch, an important feature of any wearable device. The capacitive sensor design can be made more or less sensitive to bending by shifting it relative to the neutral axis. Ultimately, the approach is adaptable to the detection of proximity, touch, pressure, and even the conformation of the sensor surface.
可弯曲、可拉伸和透明触摸传感器的开发是电子皮肤、可穿戴设备和灵活手持设备等各种领域的新兴技术目标。虽然基于金属网格、碳纳米管和银纳米线的透明触觉传感器在弯曲配置下能够工作,但我们提出了一种技术,将操作模式扩展到包括在主动弯曲甚至拉伸过程中对手指接近的感应,包括轻触。这是通过使用可拉伸和离子导电水凝胶电极来实现的,这些电极在传感器上方投射电场,与手指耦合并感应手指。聚丙烯酰胺电极嵌入硅酮中。这两种广泛使用的、低成本的透明材料通过三步制造技术结合在一起,该技术适用于大面积制造。该方法使用具有 5 毫米间距的 4×4 交叉网格传感器阵列进行了演示。手指在传感器上方几厘米处悬停的情况很容易被检测到。轻触会导致电容局部下降 15%。手指的运动可以在整个阵列上跟踪,并且可以检测到多个手指的位置。触摸在弯曲和拉伸过程中都可以被检测到,这是任何可穿戴设备的重要特征。通过相对中性轴移动传感器,可以使电容传感器设计对弯曲的敏感度更高或更低。最终,该方法可以适应对接近、触摸、压力甚至传感器表面形状的检测。