Li Xin, Zhang Peng, Guo Jiming, Wang Jinling, Qiu Weining
School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China.
Key Laboratory of Precise Engineering and Industry Surveying of National Administration of Surveying, Mapping and Geoinformation, Wuhan University, Wuhan 430079, China.
Sensors (Basel). 2017 Apr 21;17(4):921. doi: 10.3390/s17040921.
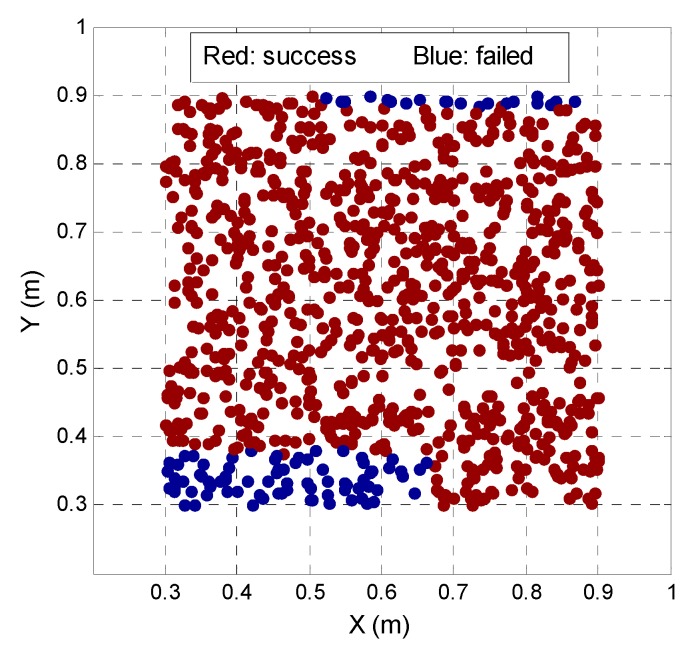
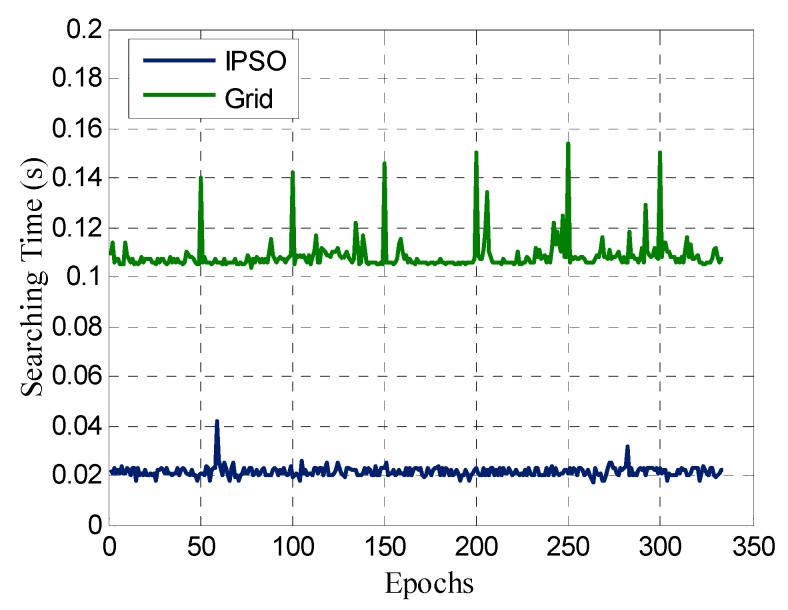
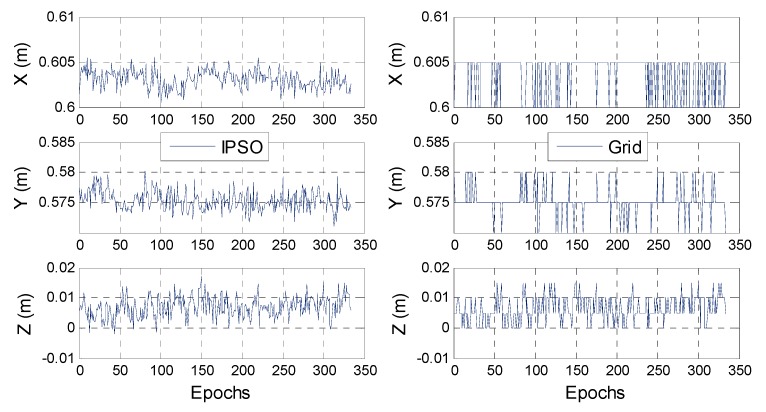
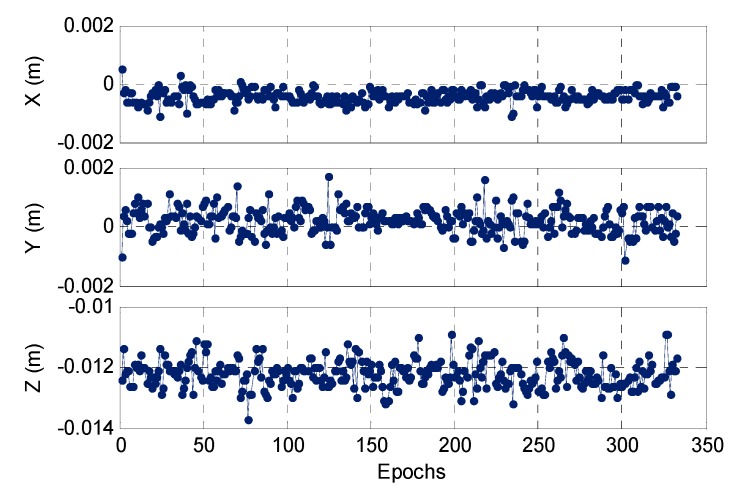
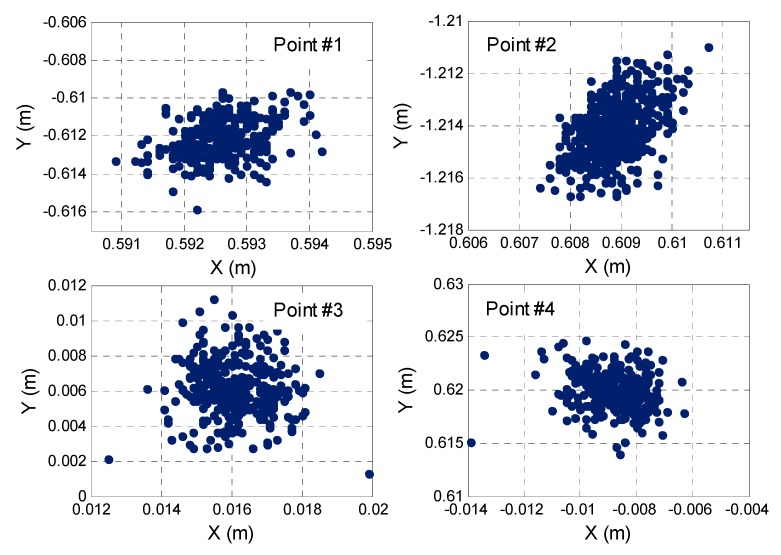
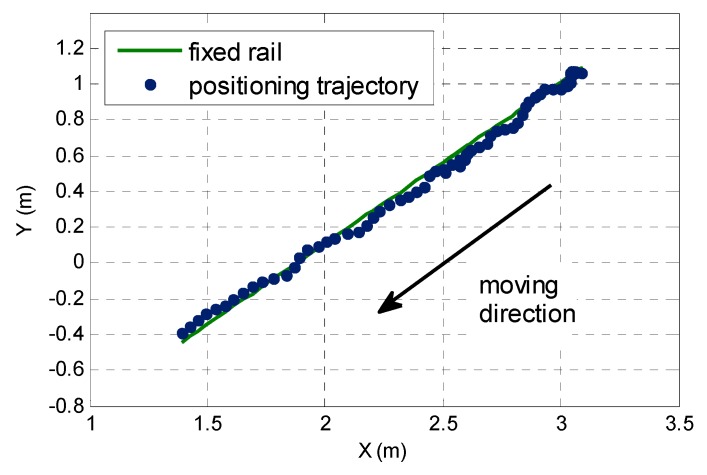
Ambiguity resolution (AR) is crucial for high-precision indoor pseudolite positioning. Due to the existing characteristics of the pseudolite positioning system, such as the geometry structure of the stationary pseudolite which is consistently invariant, the indoor signal is easy to interrupt and the first order linear truncation error cannot be ignored, and a new AR method based on the idea of the ambiguity function method (AFM) is proposed in this paper. The proposed method is a single-epoch and nonlinear method that is especially well-suited for indoor pseudolite positioning. Considering the very low computational efficiency of conventional AFM, we adopt an improved particle swarm optimization (IPSO) algorithm to search for the best solution in the coordinate domain, and variances of a least squares adjustment is conducted to ensure the reliability of the solving ambiguity. Several experiments, including static and kinematic tests, are conducted to verify the validity of the proposed AR method. Numerical results show that the IPSO significantly improved the computational efficiency of AFM and has a more elaborate search ability compared to the conventional grid searching method. For the indoor pseudolite system, which had an initial approximate coordinate precision better than 0.2 m, the AFM exhibited good performances in both static and kinematic tests. With the corrected ambiguity gained from our proposed method, indoor pseudolite positioning can achieve centimeter-level precision using a low-cost single-frequency software receiver.
模糊度解算(AR)对于高精度室内伪卫星定位至关重要。由于伪卫星定位系统的现有特性,如固定伪卫星的几何结构始终不变、室内信号容易中断且一阶线性截断误差不可忽略,本文提出了一种基于模糊度函数法(AFM)思想的新AR方法。所提方法是一种单历元非线性方法,特别适用于室内伪卫星定位。考虑到传统AFM的计算效率非常低,我们采用改进的粒子群优化(IPSO)算法在坐标域中搜索最优解,并进行最小二乘平差的方差计算以确保模糊度解算的可靠性。进行了包括静态和动态测试在内的多项实验,以验证所提AR方法的有效性。数值结果表明,IPSO显著提高了AFM的计算效率,并且与传统网格搜索方法相比具有更精细的搜索能力。对于初始近似坐标精度优于0.2 m的室内伪卫星系统,AFM在静态和动态测试中均表现出良好的性能。利用我们所提方法得到的校正模糊度,使用低成本单频软件接收机进行室内伪卫星定位可实现厘米级精度。