School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China.
Key Laboratory of Precise Engineering and Industry Surveying of National Administration of Surveying, Mapping and Geoinformation, Wuhan University, Wuhan 430079, China.
Sensors (Basel). 2018 Jun 20;18(6):1977. doi: 10.3390/s18061977.
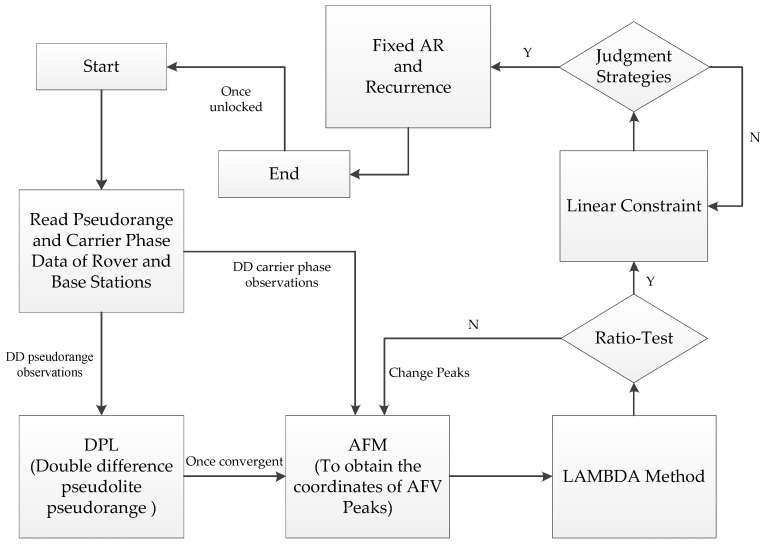
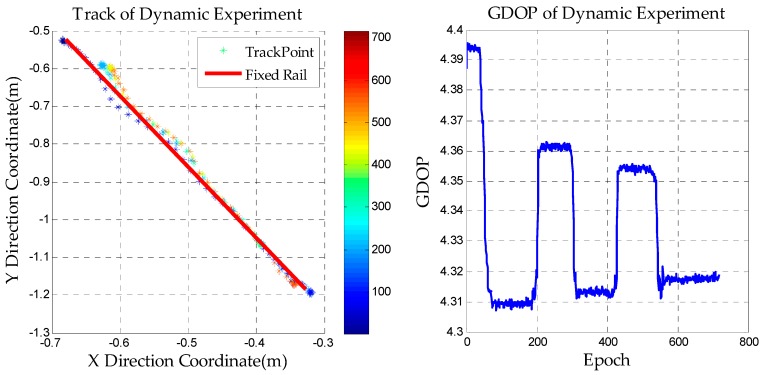
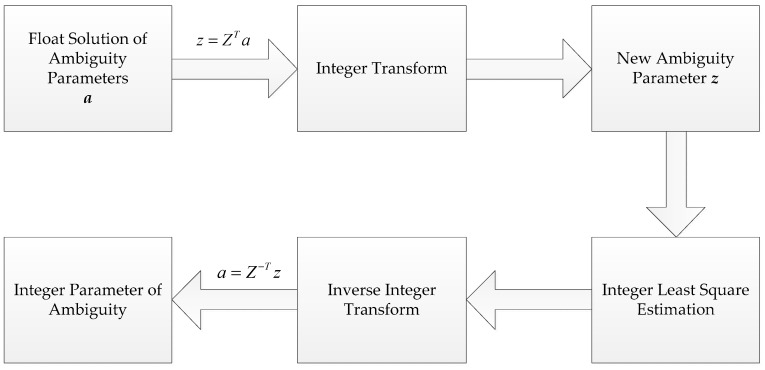
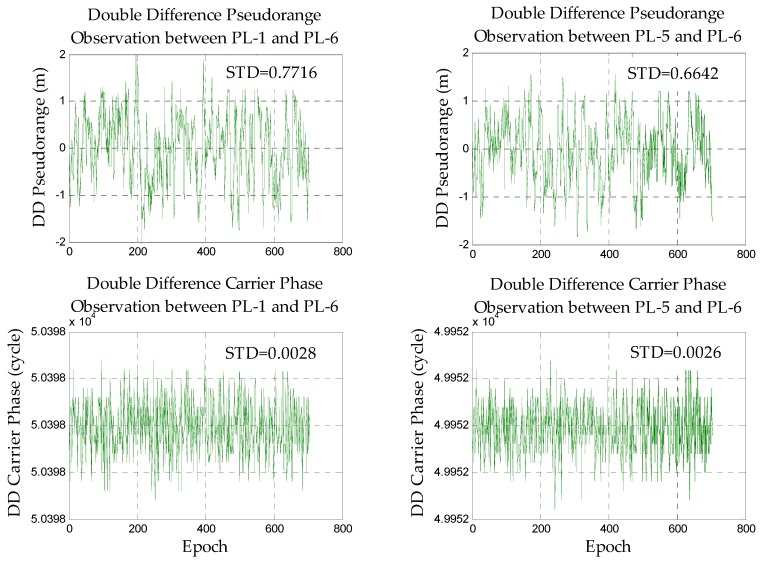
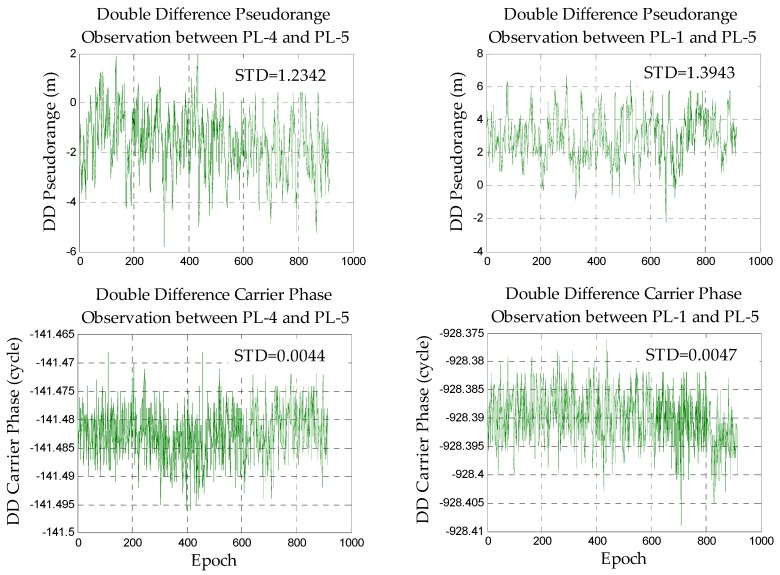
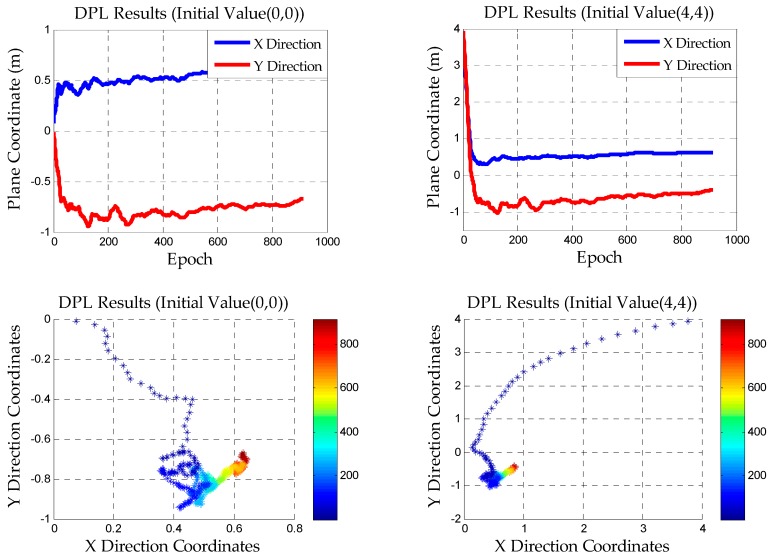
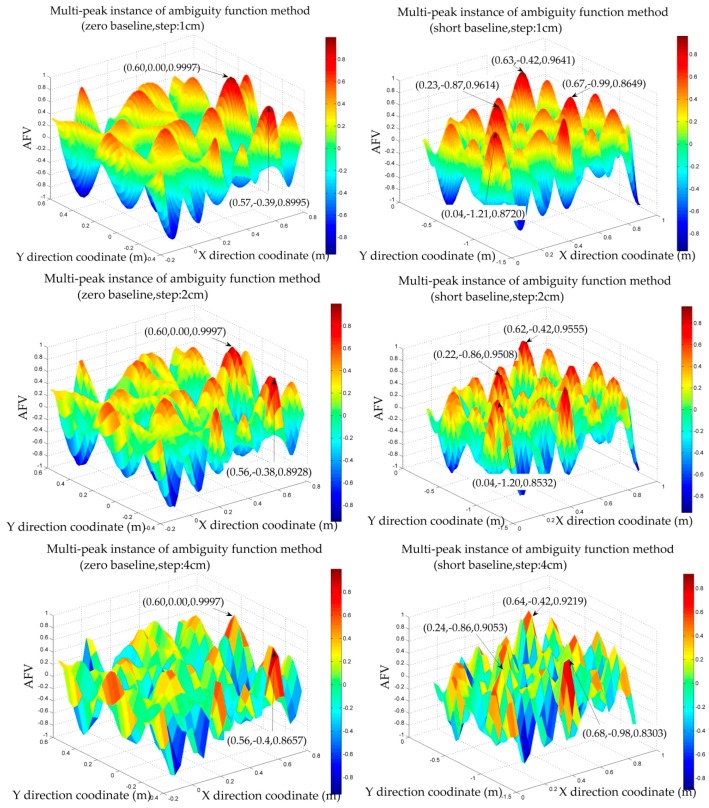
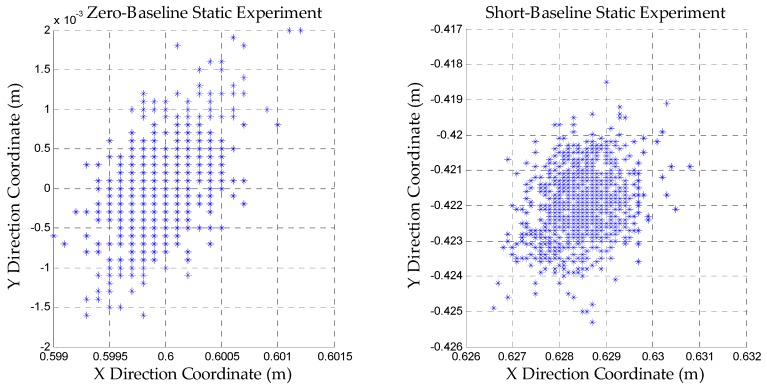
Due to the great influence of multipath effect, noise, clock and error on pseudorange, the carrier phase double difference equation is widely used in high-precision indoor pseudolite positioning. The initial position is determined mostly by the known point initialization (KPI) method, and then the ambiguities can be fixed with the LAMBDA method. In this paper, a new method without using the KPI to achieve high-precision indoor pseudolite positioning is proposed. The initial coordinates can be quickly obtained to meet the accuracy requirement of the indoor LAMBDA method. The detailed processes of the method follows: Aiming at the low-cost single-frequency pseudolite system, the static differential pseudolite system (DPL) method is used to obtain the low-accuracy positioning coordinates of the rover station quickly. Then, the ambiguity function method (AFM) is used to search for the coordinates in the corresponding epoch. The real coordinates obtained by AFM can meet the initial accuracy requirement of the LAMBDA method, so that the double difference carrier phase ambiguities can be correctly fixed. Following the above steps, high-precision indoor pseudolite positioning can be realized. Several experiments, including static and dynamic tests, are conducted to verify the feasibility of the new method. According to the results of the experiments, the initial coordinates with the accuracy of decimeter level through the DPL can be obtained. For the AFM part, both a one-meter search scope and two-centimeter or four-centimeter search steps are used to ensure the precision at the centimeter level and high search efficiency. After dealing with the problem of multiple peaks caused by the ambiguity cosine function, the coordinate information of the maximum ambiguity function value (AFV) is taken as the initial value of the LAMBDA, and the ambiguities can be fixed quickly. The new method provides accuracies at the centimeter level for dynamic experiments and at the millimeter level for static ones.
由于伪距的多径效应、噪声、时钟和误差等因素的影响较大,载波相位双差方程广泛应用于高精度室内伪卫星定位。初始位置主要由已知点初始化(KPI)方法确定,然后可以使用 LAMBDA 方法固定模糊度。本文提出了一种新的不使用 KPI 实现高精度室内伪卫星定位的方法。可以快速获得初始坐标,以满足室内 LAMBDA 方法的精度要求。该方法的详细步骤如下:针对低成本单频伪卫星系统,采用静态差分伪卫星系统(DPL)方法快速获得移动站的低精度定位坐标。然后,使用模糊度函数方法(AFM)在相应的历元中搜索坐标。通过 AFM 获得的真实坐标可以满足 LAMBDA 方法的初始精度要求,从而正确固定双差载波相位模糊度。按照上述步骤,可以实现高精度的室内伪卫星定位。进行了几项实验,包括静态和动态测试,以验证新方法的可行性。根据实验结果,通过 DPL 可以获得分米级精度的初始坐标。对于 AFM 部分,使用一米搜索范围和两厘米或四厘米搜索步长,以确保厘米级精度和高搜索效率。在解决了模糊余弦函数引起的多个峰问题后,将最大模糊度函数值(AFV)的坐标信息作为 LAMBDA 的初始值,快速固定模糊度。新方法为动态实验提供厘米级精度,为静态实验提供毫米级精度。