Frullo John Michael, Elinger Jared, Pehlivan Ali Utku, Fitle Kyle, Nedley Kathryn, Francisco Gerard E, Sergi Fabrizio, O'Malley Marcia K
Department of Mechanical Engineering, Rice University, Houston, TX, United States.
TIRR Memorial Hermann, Houston, TX, United States.
Front Neurorobot. 2017 Jun 13;11:26. doi: 10.3389/fnbot.2017.00026. eCollection 2017.
Robotic rehabilitation of the upper limb following neurological injury has been supported through several large clinical studies for individuals with chronic stroke. The application of robotic rehabilitation to the treatment of other neurological injuries is less developed, despite indications that strategies successful for restoration of motor capability following stroke may benefit individuals with incomplete spinal cord injury (SCI) as well. Although recent studies suggest that robot-aided rehabilitation might be beneficial after incomplete SCI, it is still unclear what type of robot-aided intervention contributes to motor recovery.
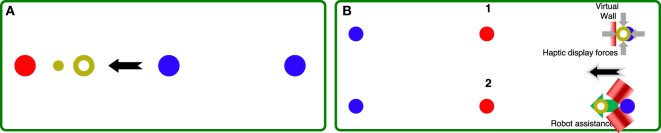
We developed a novel assist-as-needed (AAN) robotic controller to adjust challenge and robotic assistance continuously during rehabilitation therapy delivered via an upper extremity exoskeleton, the MAHI Exo-II, to train independent elbow and wrist joint movements. We further enrolled seventeen patients with incomplete spinal cord injury (AIS C and D levels) in a parallel-group balanced controlled trial to test the efficacy of the AAN controller, compared to a subject-triggered (ST) controller that does not adjust assistance or challenge levels continuously during therapy. The conducted study is a stage two, development-of-concept pilot study.
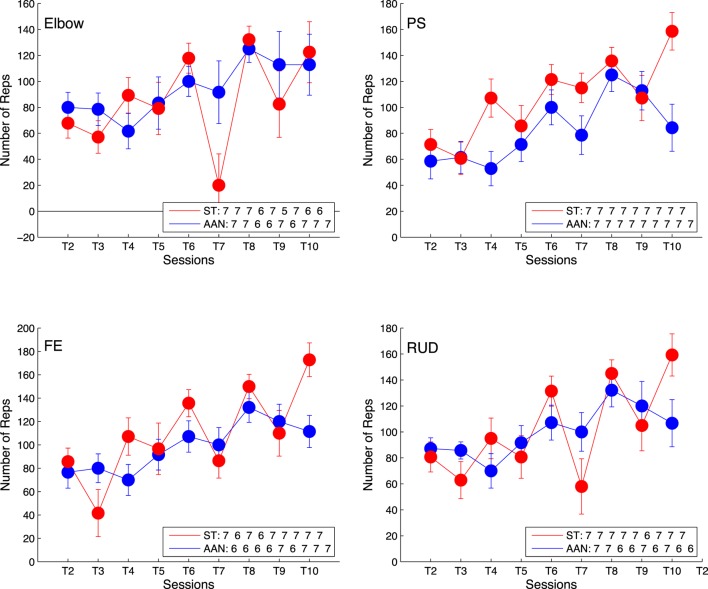
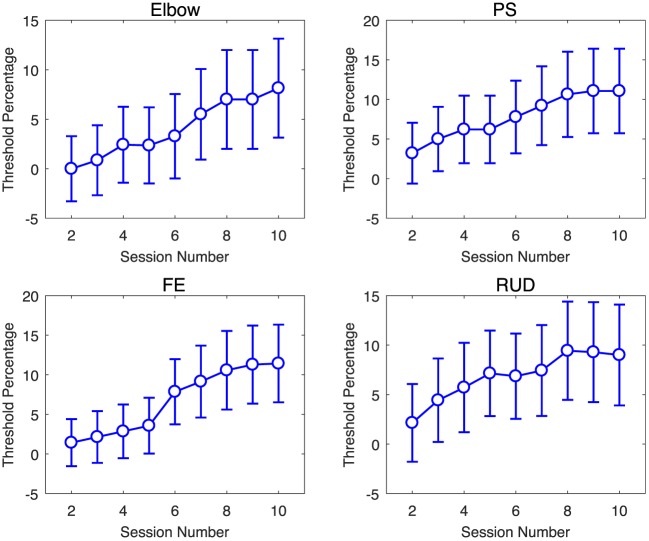
We validated the AAN controller in its capability of modulating assistance and challenge during therapy via analysis of longitudinal robotic metrics. For the selected primary outcome measure, the pre-post difference in ARAT score, no statistically significant change was measured in either group of subjects. Ancillary analysis of secondary outcome measures obtained via robotic testing indicates gradual improvement in movement quality during the therapy program in both groups, with the AAN controller affording greater increases in movement quality over the ST controller.
The present study demonstrates feasibility of subject-adaptive robotic therapy after incomplete spinal cord injury, but does not demonstrate gains in arm function occurring as a result of the robot-assisted rehabilitation program, nor differential gains obtained as a result of the developed AAN controller. Further research is warranted to better quantify the recovery potential provided by AAN control strategies for robotic rehabilitation of the upper limb following incomplete SCI. : NCT02803255.
多项大型临床研究支持对慢性中风患者进行上肢机器人康复治疗。尽管有迹象表明,中风后恢复运动能力的成功策略可能也有益于不完全性脊髓损伤(SCI)患者,但机器人康复在治疗其他神经损伤方面的应用尚欠发达。尽管最近的研究表明,机器人辅助康复可能对不完全性SCI有益,但仍不清楚哪种类型的机器人辅助干预有助于运动恢复。
我们开发了一种新型按需辅助(AAN)机器人控制器,以便在通过上肢外骨骼MAHI Exo-II进行康复治疗期间持续调整挑战程度和机器人辅助力度,以训练独立的肘部和腕关节运动。我们进一步招募了17名不完全性脊髓损伤(AIS C级和D级)患者,进行一项平行组平衡对照试验,以测试AAN控制器的疗效,并与一种在治疗期间不持续调整辅助或挑战水平的受试者触发(ST)控制器进行比较。所开展的研究是一项概念验证的二期试验性研究。
通过对纵向机器人指标的分析,我们验证了AAN控制器在治疗期间调节辅助和挑战的能力。对于选定的主要结局指标,即ARAT评分的前后差异,两组受试者均未测得具有统计学意义的变化。通过机器人测试获得的次要结局指标的辅助分析表明,两组在治疗方案实施期间运动质量均逐渐改善,与ST控制器相比,AAN控制器使运动质量提高得更多。
本研究证明了不完全性脊髓损伤后受试者适应性机器人治疗的可行性,但未证明机器人辅助康复方案能使手臂功能得到改善,也未证明所开发的AAN控制器能带来不同的改善效果。有必要开展进一步研究,以更好地量化AAN控制策略为不完全性SCI后上肢机器人康复提供的恢复潜力。试验注册号:NCT02803255。