Non-invasive Brain Stimulation and Human Motor Control Laboratory, Burke Medical Research Institute, White Plains, NY, USA.
NeuroRehabilitation. 2013;33(1):57-65. doi: 10.3233/NRE-130928.
Recovering upper-limb motor function has important implications for improving independence of patients with tetraplegia after traumatic spinal cord injury (SCI).
To evaluate the feasibility, safety and effectiveness of robotic-assisted training of upper limb in a chronic SCI population.
A total of 10 chronic tetraplegic SCI patients (C4 to C6 level of injury, American Spinal Injury Association Impairment Scale, A to D) participated in a 6-week wrist-robot training protocol (1 hour/day 3 times/week). The following outcome measures were recorded at baseline and after the robotic training: a) motor performance, assessed by robot-measured kinematics, b) corticospinal excitability measured by transcranial magnetic stimulation (TMS), and c) changes in clinical scales: motor strength (Upper extremity motor score), pain level (Visual Analog Scale) and spasticity (Modified Ashworth scale).
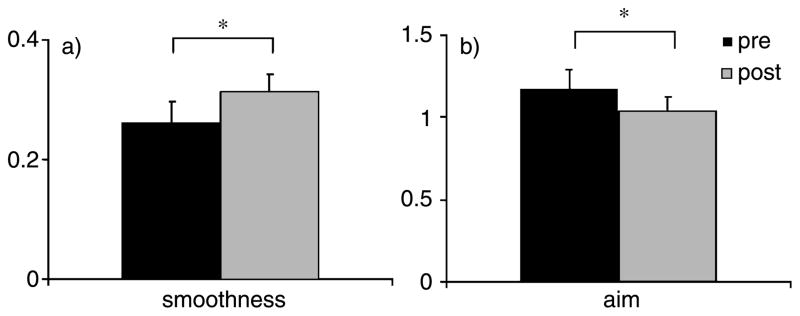
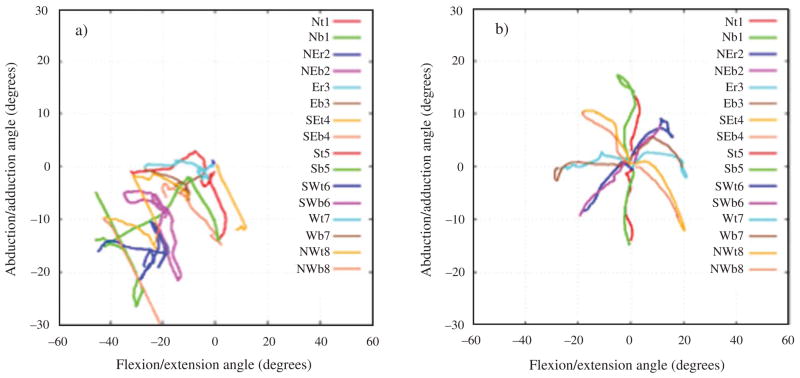
No adverse effects were observed during or after the robotic training. Statistically significant improvements were found in motor performance kinematics: aim (pre 1.17 ± 0.11 raduans, post 1.03 ± 0.08 raduans, p = 0.03) and smoothness of movement (pre 0.26 ± 0.03, post 0.31 ± 0.02, p = 0.03). These changes were not accompanied by changes in upper-extremity muscle strength or corticospinal excitability. No changes in pain or spasticity were found.
Robotic-assisted training of the upper limb over six weeks is a feasible and safe intervention that can enhance movement kinematics without negatively affecting pain or spasticity in chronic SCI. In addition, robot-assisted devices are an excellent tool to quantify motor performance (kinematics) and can be used to sensitively measure changes after a given rehabilitative intervention.
恢复上肢运动功能对于提高外伤性脊髓损伤后四肢瘫痪患者的独立性具有重要意义。
评估上肢机器人辅助训练在慢性脊髓损伤人群中的可行性、安全性和有效性。
共 10 例慢性四肢瘫脊髓损伤患者(损伤水平 C4 至 C6,美国脊髓损伤协会损伤量表 A 至 D 级)参与了为期 6 周的腕部机器人训练方案(每天 1 小时,每周 3 次)。在基线和机器人训练后记录以下结果测量:a)运动表现,通过机器人测量的运动学评估;b)皮质脊髓兴奋性,通过经颅磁刺激(TMS)测量;c)临床量表的变化:运动力量(上肢运动评分)、疼痛程度(视觉模拟量表)和痉挛程度(改良 Ashworth 量表)。
在机器人训练过程中和之后,均未观察到不良反应。运动表现运动学方面有显著改善:目标(治疗前 1.17 ± 0.11 弧度,治疗后 1.03 ± 0.08 弧度,p = 0.03)和运动平滑度(治疗前 0.26 ± 0.03,治疗后 0.31 ± 0.02,p = 0.03)。这些变化与上肢肌肉力量或皮质脊髓兴奋性的变化无关。未发现疼痛或痉挛程度的变化。
六周上肢机器人辅助训练是一种可行且安全的干预措施,可增强运动运动学,而不会对慢性脊髓损伤患者的疼痛或痉挛产生负面影响。此外,机器人辅助设备是量化运动表现(运动学)的绝佳工具,并可用于敏感地测量给定康复干预后的变化。