Xu Zhengzheng, Yao Rutao, Podgorsak Matthew B, Wang Iris Z
Department of Radiation Medicine, Roswell Park Cancer Institute, Buffalo, NY, USA.
Department of Physiology and Biophysics, State University of New York at Buffalo, Buffalo, NY, USA.
J Appl Clin Med Phys. 2017 Sep;18(5):54-63. doi: 10.1002/acm2.12132. Epub 2017 Jul 21.
The aim of this study was to find an optimized configuration of collimator angle, couch angle, and starting tracking phase to improve the delivery performance in terms of MLC position errors, maximal MLC leaf speed, and total beam-on time of DCAT plans with motion tracking (4D DCAT).
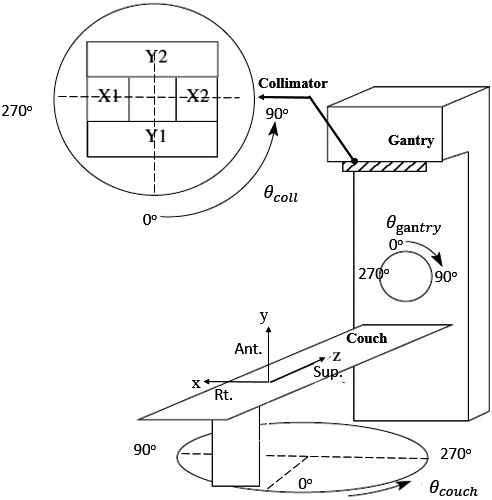
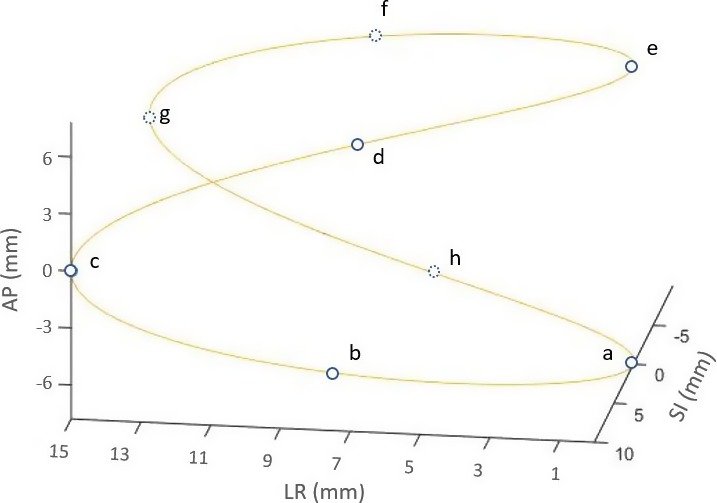
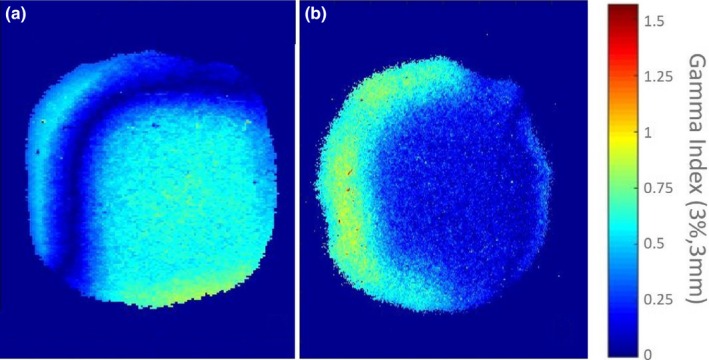
Nontracking conformal arc plans were first created based on a single phase (maximal exhalation phase) of a respiratory motion phantom with a spherical target. An ideal model was used to simulate the target motion in superior-inferior (SI), anterior-posterior (AP), and left-right (LR) dimensions. The motion was decomposed to the MLC leaf position coordinates for motion compensation and generating 4D DCAT plans. The plans were studied with collimator angle ranged from 0° to 90°; couch angle ranged from 350°(-10°) to 10°; and starting tracking phases at maximal inhalation (θ=π/2) and exhalation (θ=0) phases. Plan performance score (PPS) evaluates the plan complexity including the variability in MLC leaf positions, degree of irregularity in field shape and area. PPS ranges from 0 to 1, where low PPS indicates a plan with high complexity. The 4D DCAT plans with the maximal and the minimal PPS were selected and delivered on a Varian TrueBeam linear accelerator. Gafchromic-EBT3 dosimetry films were used to measure the dose delivered to the target in the phantom. Gamma analysis for film measurements with 90% passing rate threshold using 3%/3 mm criteria and trajectory log files were analyzed for plan delivery accuracy evaluation.
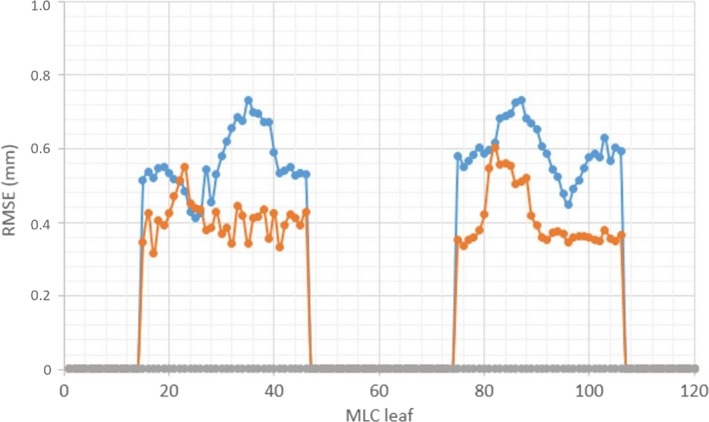
The maximal PPS of all the plans was 0.554, achieved with collimator angle at 87°, couch angle at 350°, and starting phase at maximal inhalation (θ=π/2). The maximal MLC leaf speed, MLC leaf errors, total leaf travel distance, and beam-on time were 20 mm/s, 0.39 ± 0.16 mm, 1385 cm, and 157 s, respectively. The starting phase, whether at maximal inhalation or exhalation had a relatively small contribution to PPS (0.01 ± 0.05).
By selecting collimator angle, couch angle, and starting tracking phase, 4D DCAT plans with the maximal PPS demonstrated less MLC leaf position errors, lower maximal MLC leaf speed, and shorter beam-on time which improved the performance of 4D motion-tracking DCAT delivery.
本研究的目的是找到准直器角度、治疗床角度和起始跟踪相位的优化配置,以在多叶准直器(MLC)位置误差、MLC最大叶片速度和带有运动跟踪功能的动态适形调强放疗(DCAT)计划(4D DCAT)的总束流时间方面提高计划执行性能。
首先基于带有球形靶区的呼吸运动体模的单个相位(最大呼气相位)创建非跟踪适形弧计划。使用理想模型模拟靶区在上下(SI)、前后(AP)和左右(LR)方向上的运动。将该运动分解为MLC叶片位置坐标以进行运动补偿并生成4D DCAT计划。研究这些计划时,准直器角度范围为0°至90°;治疗床角度范围为350°(-10°)至10°;起始跟踪相位为最大吸气(θ = π/2)和呼气(θ = 0)相位。计划性能评分(PPS)评估计划的复杂性,包括MLC叶片位置的变化、射野形状和面积的不规则程度。PPS范围为0至1,其中低PPS表示复杂性高的计划。选择具有最大和最小PPS的4D DCAT计划,并在瓦里安TrueBeam直线加速器上执行。使用Gafchromic-EBT3剂量测定薄膜测量体模中靶区所接受的剂量。使用3%/3 mm标准对薄膜测量进行通过率阈值为90%的伽马分析,并分析轨迹日志文件以评估计划执行的准确性。
所有计划的最大PPS为0.554,准直器角度为87°、治疗床角度为350°且起始相位为最大吸气(θ = π/2)时可实现该值。MLC最大叶片速度、MLC叶片误差、叶片总行程距离和束流时间分别为20 mm/s、0.39±0.16 mm、1385 cm和157 s。起始相位,无论是最大吸气还是呼气,对PPS的贡献相对较小(0.01±0.05)。
通过选择准直器角度、治疗床角度和起始跟踪相位,具有最大PPS的4D DCAT计划显示出较小的MLC叶片位置误差、较低的MLC最大叶片速度和较短的束流时间,从而提高了4D运动跟踪DCAT计划执行的性能。