Moore Talia Y, Cooper Kimberly L, Biewener Andrew A, Vasudevan Ramanarayan
Department of Organismic and Evolutionary Biology, Harvard University, 26 Oxford Street, Cambridge, MA, 02138, USA.
Harvard Concord Field Station, 100 Old Causeway Road, Bedford, MA, 01730, USA.
Nat Commun. 2017 Sep 5;8(1):440. doi: 10.1038/s41467-017-00373-2.
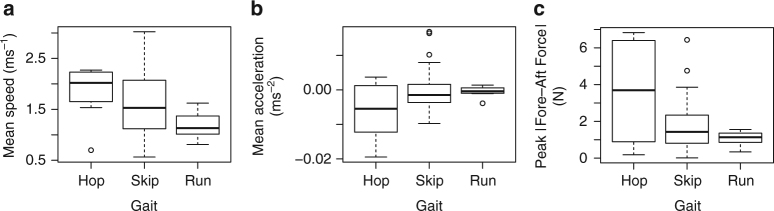
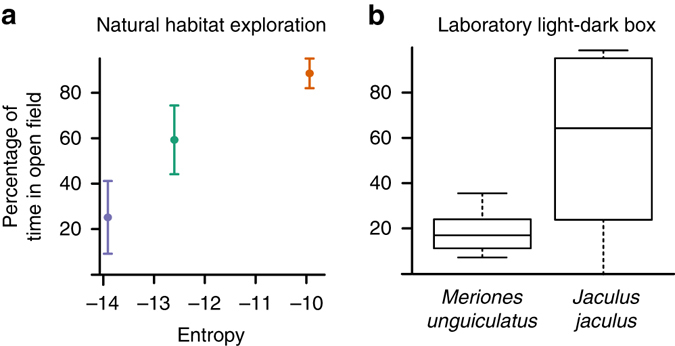
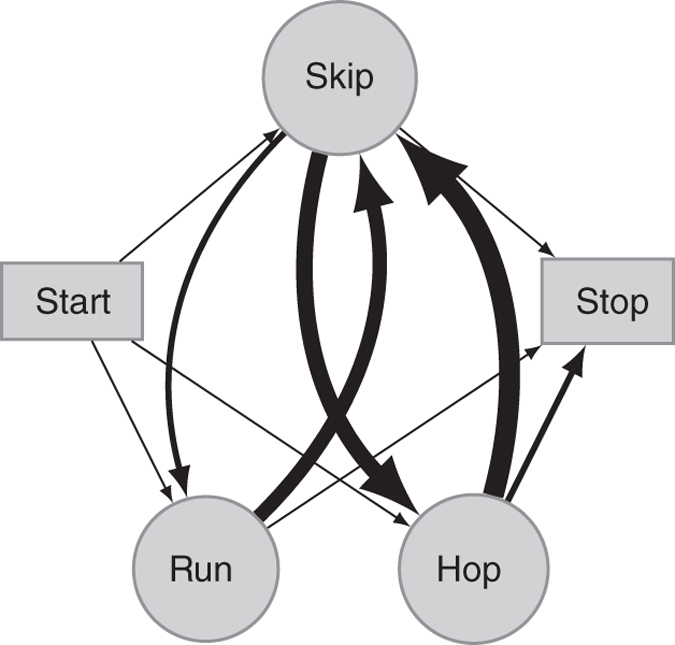
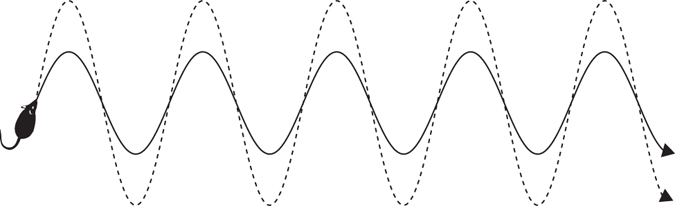
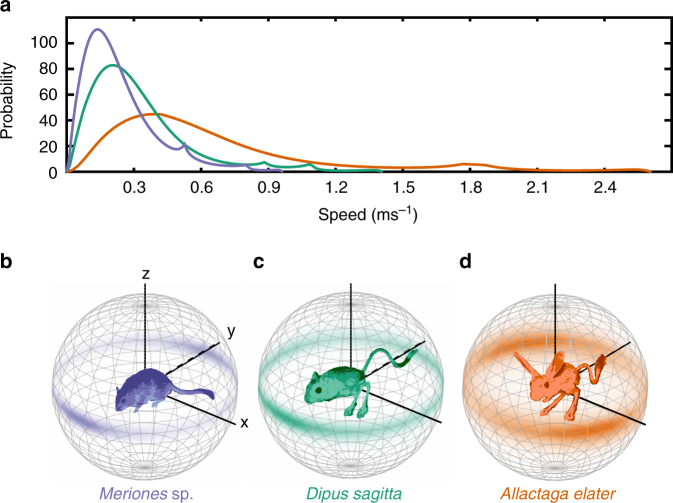
Mechanistically linking movement behaviors and ecology is key to understanding the adaptive evolution of locomotion. Predator evasion, a behavior that enhances fitness, may depend upon short bursts or complex patterns of locomotion. However, such movements are poorly characterized by existing biomechanical metrics. We present methods based on the entropy measure of randomness from Information Theory to quantitatively characterize the unpredictability of non-steady-state locomotion. We then apply the method by examining sympatric rodent species whose escape trajectories differ in dimensionality. Unlike the speed-regulated gait use of cursorial animals to enhance locomotor economy, bipedal jerboa (family Dipodidae) gait transitions likely enhance maneuverability. In field-based observations, jerboa trajectories are significantly less predictable than those of quadrupedal rodents, likely increasing predator evasion ability. Consistent with this hypothesis, jerboas exhibit lower anxiety in open fields than quadrupedal rodents, a behavior that varies inversely with predator evasion ability. Our unpredictability metric expands the scope of quantitative biomechanical studies to include non-steady-state locomotion in a variety of evolutionary and ecologically significant contexts.Biomechanical understanding of animal gait and maneuverability has primarily been limited to species with more predictable, steady-state movement patterns. Here, the authors develop a method to quantify movement predictability, and apply the method to study escape-related movement in several species of desert rodents.
从机制上将运动行为与生态学联系起来是理解运动适应性进化的关键。捕食者逃避是一种增强适应性的行为,可能取决于短时间的爆发或复杂的运动模式。然而,现有的生物力学指标很难描述此类运动。我们提出基于信息论中随机性熵测度的方法,以定量描述非稳态运动的不可预测性。然后,我们通过研究同域分布的啮齿动物物种来应用该方法,这些物种的逃逸轨迹在维度上有所不同。与奔跑动物通过调节速度的步态来提高运动经济性不同,双足跳鼠(跳鼠科)的步态转变可能会增强机动性。在实地观察中,跳鼠的轨迹比四足啮齿动物的轨迹更难预测,这可能会提高其躲避捕食者的能力。与这一假设一致,跳鼠在开阔地带表现出的焦虑程度低于四足啮齿动物,这种行为与躲避捕食者的能力呈负相关。我们的不可预测性指标扩展了定量生物力学研究的范围,将各种具有进化和生态意义的非稳态运动纳入其中。对动物步态和机动性的生物力学理解主要局限于具有更可预测的稳态运动模式的物种。在这里,作者开发了一种量化运动可预测性的方法,并将该方法应用于研究几种沙漠啮齿动物与逃避相关的运动。