UCL TouchLab, Department of Computer Science, University College London, London, WC1E 6BT, UK.
National Physical Laboratory, Hampton Road, Teddington, Middlesex, TW11 0LW, UK.
Sci Rep. 2017 Sep 26;7(1):12329. doi: 10.1038/s41598-017-12190-0.
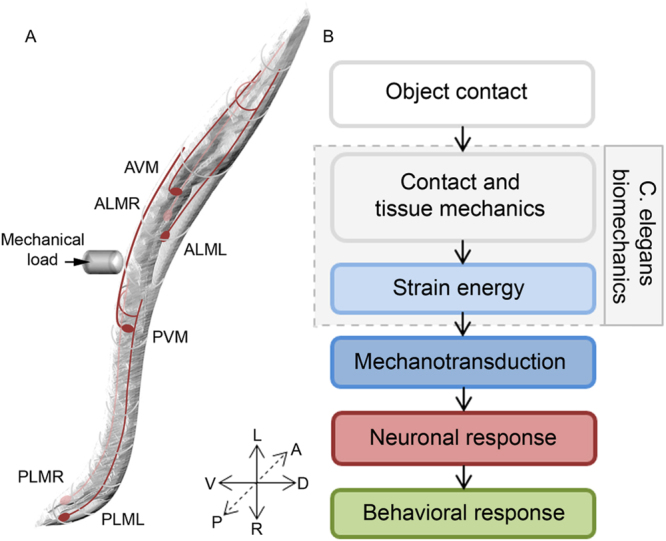
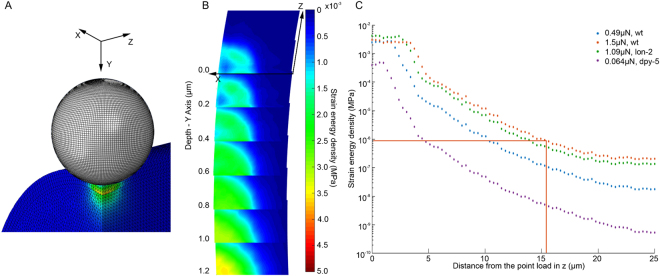
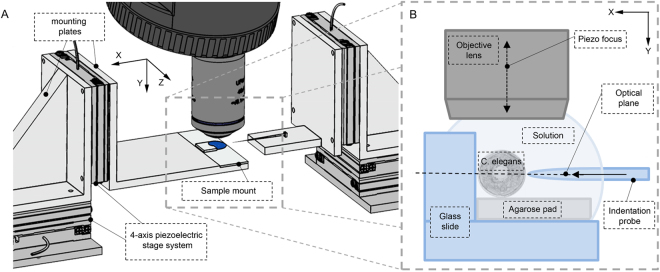
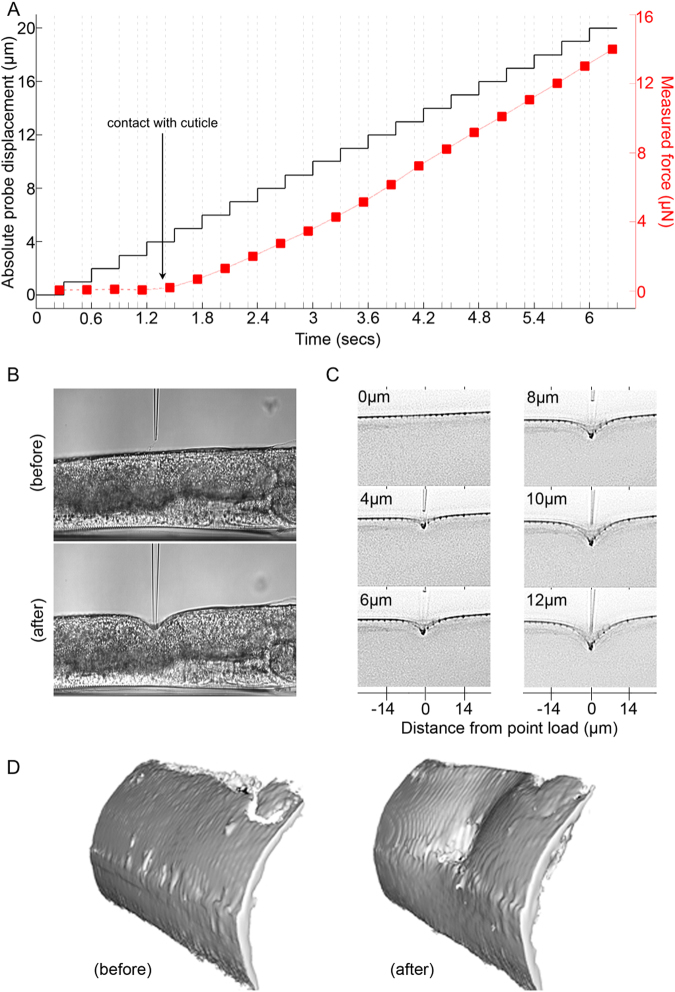
The sense of touch is a fundamental mechanism that nearly all organisms use to interact with their surroundings. However, the process of mechanotransduction whereby a mechanical stimulus gives rise to a neuronal response is not well understood. In this paper we present an investigation of the biomechanics of touch using the model organism C. elegans. By developing a custom micromanipulation and force sensing system around a high resolution optical microscope, we measured the spatial deformation of the organism's cuticle and force response to controlled uniaxial indentations. We combined these experimental results with anatomical data to create a multilayer computational biomechanical model of the organism and accurately derive its material properties such as the elastic modulus and poisson's ratio. We demonstrate the utility of this model by combining it with previously published electrophysiological data to provide quantitative insights into different biomechanical states for mechanotransduction, including the first estimate of the sensitivity of an individual mechanoreceptor to an applied stimulus (parameterised as strain energy density). We also interpret empirical behavioural data to estimate the minimum number of mechanoreceptors which must be activated to elicit a behavioural response.
触觉是几乎所有生物体用来与周围环境相互作用的基本机制。然而,机械刺激引起神经元反应的机械转导过程还不是很清楚。在本文中,我们使用模式生物秀丽隐杆线虫来研究触觉的生物力学。通过在高分辨率光学显微镜周围开发定制的微操作和力感测系统,我们测量了生物体表皮的空间变形和对受控单轴压痕的力响应。我们将这些实验结果与解剖学数据相结合,创建了生物体的多层计算生物力学模型,并准确推导出其材料特性,如弹性模量和泊松比。我们通过将其与之前发表的电生理数据相结合,来展示该模型的实用性,从而为机械转导的不同生物力学状态提供定量见解,包括对单个机械感受器对施加刺激的敏感性的首次估计(参数化为应变能量密度)。我们还解释经验性行为数据来估计引起行为反应所必须激活的最小机械感受器数量。