Hoshiba Kotaro, Washizaki Kai, Wakabayashi Mizuho, Ishiki Takahiro, Kumon Makoto, Bando Yoshiaki, Gabriel Daniel, Nakadai Kazuhiro, Okuno Hiroshi G
Department of Systems and Control Engineering, School of Engineering, Tokyo Institute of Technology, 2-12-1 Ookayama, Meguro-ku, Tokyo 152-8552, Japan.
Graduate School of Science and Technology, Kumamoto University, 2-39-1 Kurokami, Chuo-ku, Kumamoto 860-8555, Japan.
Sensors (Basel). 2017 Nov 3;17(11):2535. doi: 10.3390/s17112535.
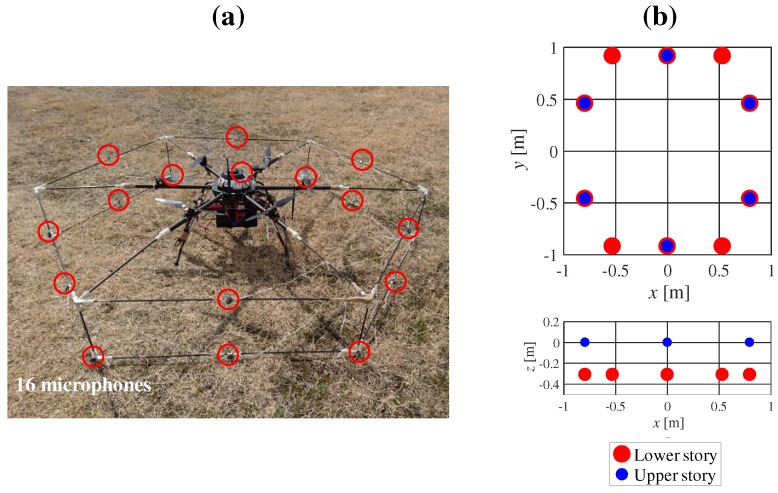
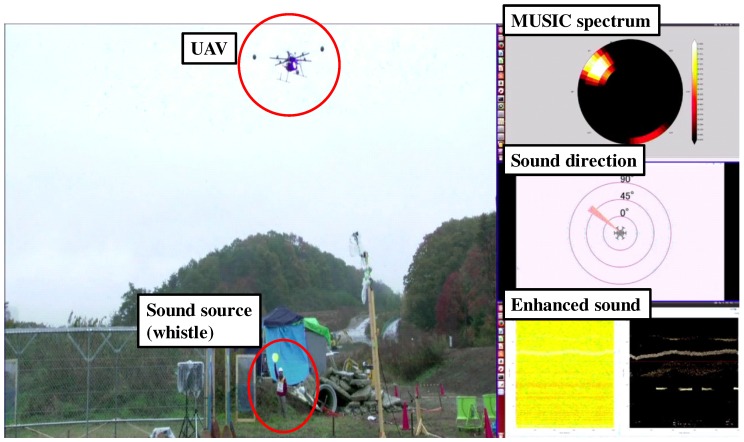
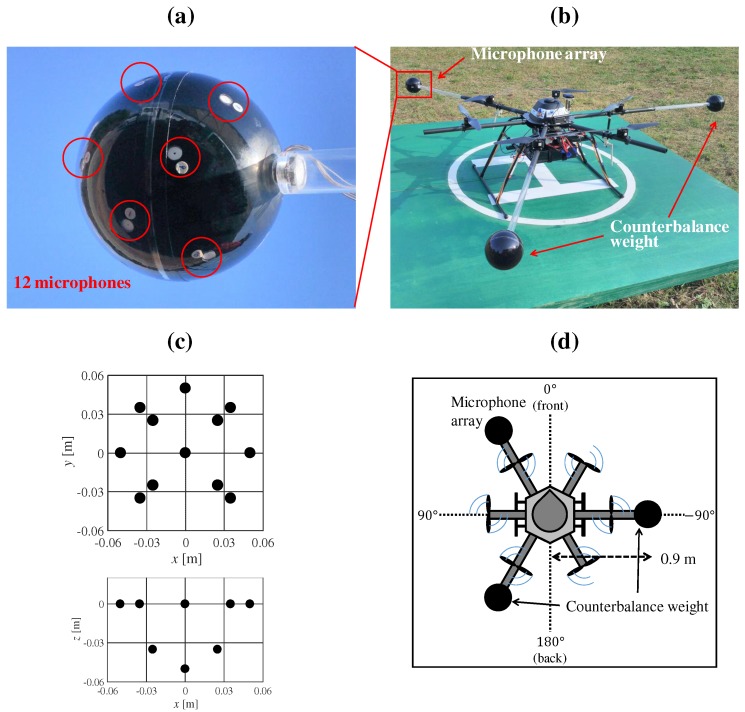
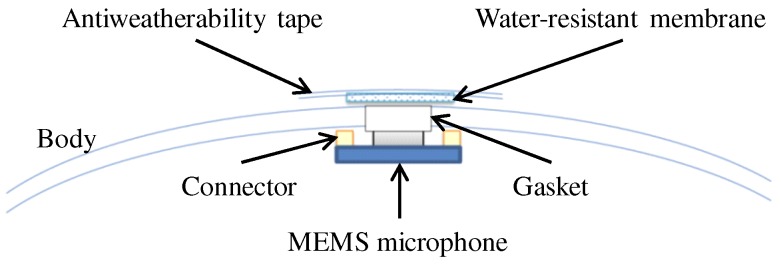
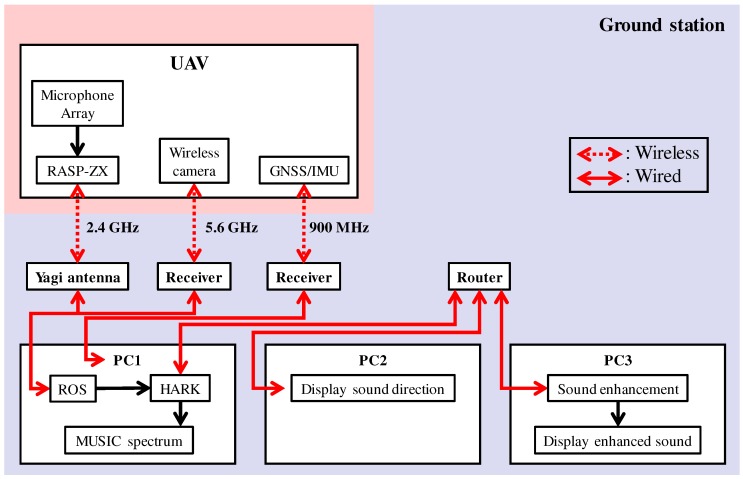
In search and rescue activities, unmanned aerial vehicles (UAV) should exploit sound information to compensate for poor visual information. This paper describes the design and implementation of a UAV-embedded microphone array system for sound source localization in outdoor environments. Four critical development problems included water-resistance of the microphone array, efficiency in assembling, reliability of wireless communication, and sufficiency of visualization tools for operators. To solve these problems, we developed a spherical microphone array system (SMAS) consisting of a microphone array, a stable wireless network communication system, and intuitive visualization tools. The performance of SMAS was evaluated with simulated data and a demonstration in the field. Results confirmed that the SMAS provides highly accurate localization, water resistance, prompt assembly, stable wireless communication, and intuitive information for observers and operators.
在搜索和救援活动中,无人机应利用声音信息来弥补视觉信息的不足。本文描述了一种用于室外环境中声源定位的无人机嵌入式麦克风阵列系统的设计与实现。四个关键的开发问题包括麦克风阵列的防水性、组装效率、无线通信的可靠性以及操作员可视化工具的充分性。为了解决这些问题,我们开发了一种球形麦克风阵列系统(SMAS),它由一个麦克风阵列、一个稳定的无线网络通信系统和直观的可视化工具组成。通过模拟数据和现场演示对SMAS的性能进行了评估。结果证实,SMAS为观察者和操作员提供了高精度的定位、防水性、快速组装、稳定的无线通信和直观的信息。