Department of Mechanical and Aerospace Engineering, New York University Tandon School of Engineering, Brooklyn, New York, 11201, USA.
Sci Rep. 2018 Jan 12;8(1):657. doi: 10.1038/s41598-017-19083-2.
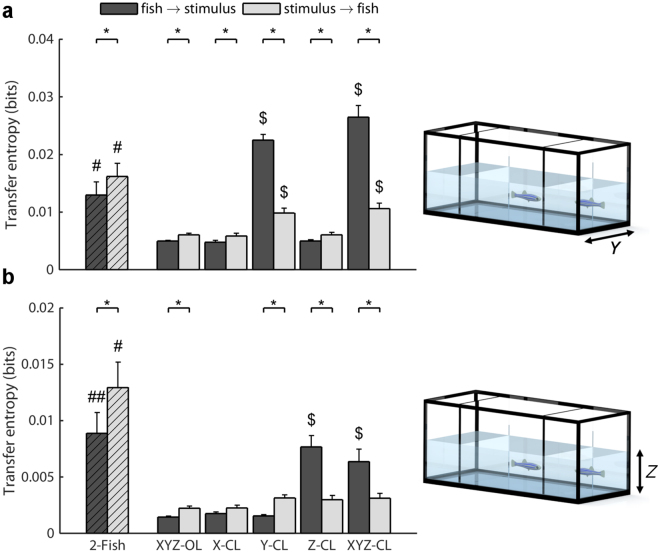
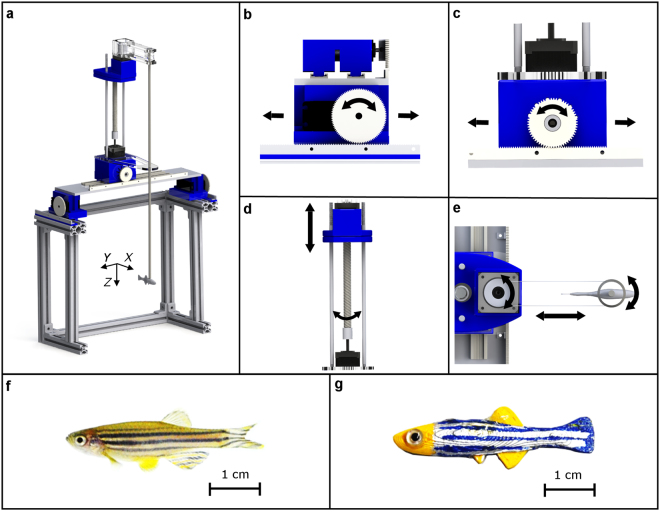
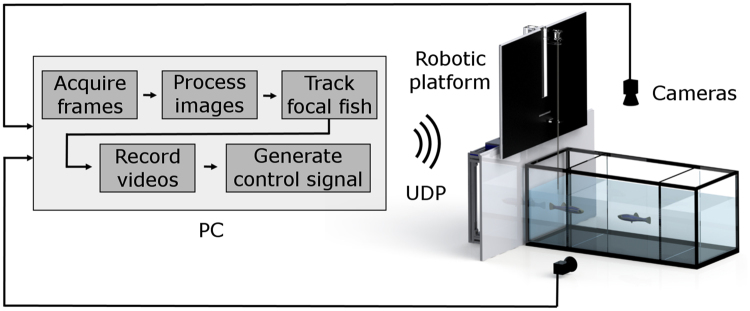
Robotics is continuously being integrated in animal behaviour studies to create customizable, controllable, and repeatable stimuli. However, few systems have capitalized on recent breakthroughs in computer vision and real-time control to enable a two-way interaction between the animal and the robot. Here, we present a "closed-loop control" system to investigate the behaviour of zebrafish, a popular animal model in preclinical studies. The system allows for actuating a biologically-inspired 3D-printed replica in a 3D workspace, in response to the behaviour of a zebrafish. We demonstrate the role of closed-loop control in modulating the response of zebrafish, across a range of behavioural and information-theoretic measures. Our results suggest that closed-loop control could enhance the degree of biomimicry of the replica, by increasing the attraction of live subjects and their interaction with the stimulus. Interactive experiments hold promise to advance our understanding of zebrafish, offering new means for high throughput behavioural phenotyping.
机器人技术不断被整合到动物行为研究中,以创建可定制、可控制和可重复的刺激。然而,很少有系统利用计算机视觉和实时控制方面的最新突破,实现动物与机器人之间的双向交互。在这里,我们提出了一种“闭环控制”系统,用于研究斑马鱼的行为,斑马鱼是临床前研究中一种流行的动物模型。该系统允许在 3D 工作空间中对生物启发的 3D 打印复制品进行驱动,以响应斑马鱼的行为。我们展示了闭环控制在调制一系列行为和信息论度量的斑马鱼反应方面的作用。我们的结果表明,闭环控制可以通过增加活体目标的吸引力及其与刺激的相互作用,增强复制品的仿生程度。交互式实验有望增进我们对斑马鱼的理解,为高通量行为表型提供新的手段。