Spinello Chiara, Yang Yanpeng, Macrì Simone, Porfiri Maurizio
Department of Mechanical and Aerospace Engineering, New York University, Tandon School of Engineering, Brooklyn, NY, United States.
Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, School of Mechanical Engineering, Tianjin University, Tianjin, China.
Front Robot AI. 2019 May 31;6:38. doi: 10.3389/frobt.2019.00038. eCollection 2019.
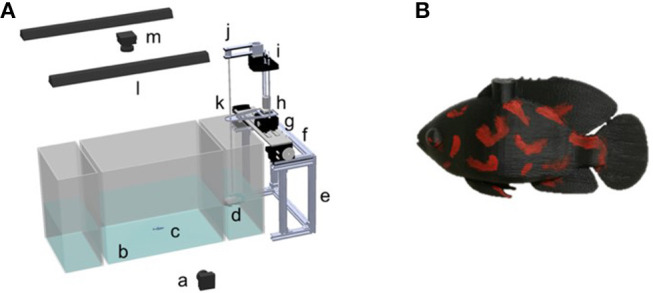
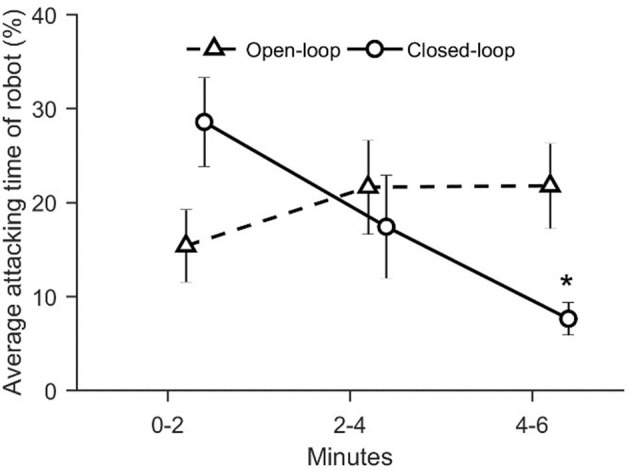
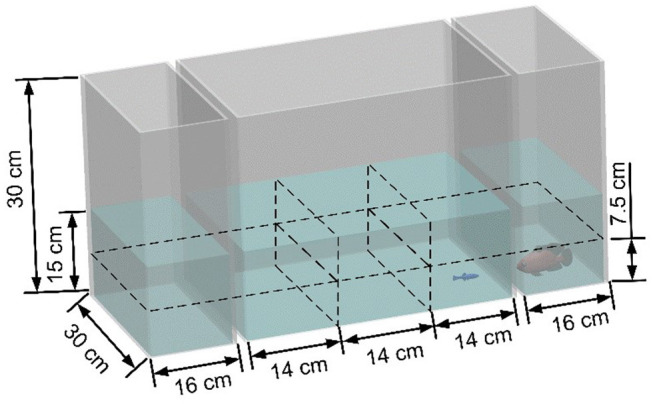
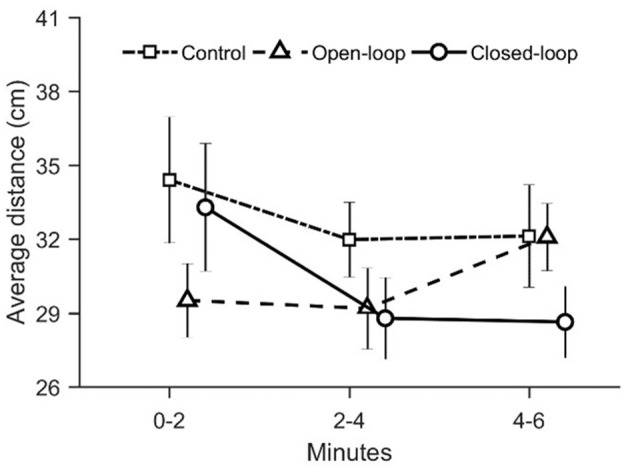
Zebrafish () constitutes a valuable experimental species for the study of the biological determinants of emotional responses, such as fear and anxiety. Fear-related test paradigms traditionally entail the interaction between focal subjects and live predators, which may show inconsistent behavior throughout the experiment. To address this technical challenge, robotic stimuli are now frequently integrated in behavioral studies, yielding repeatable, customizable, and controllable experimental conditions. While most of the research has focused on open-loop control where robotic stimuli are preprogrammed to execute a priori known actions, recent work has explored the possibility of two-way interactions between robotic stimuli and live subjects. Here, we demonstrate a "closed-loop control" system to investigate fear response of zebrafish in which the response of the robotic stimulus is determined in real-time through a finite-state Markov chain constructed from independent observations on the interactions between zebrafish and their predator. Specifically, we designed a 3D-printed robotic replica of the zebrafish allopatric predator red tiger Oscar fish (), instrumented to interact in real-time with live subjects. We investigated the role of closed-loop control in modulating fear response in zebrafish through the analysis of the focal fish ethogram and the information-theoretic quantification of the interaction between the subject and the replica. Our results indicate that closed-loop control elicits consistent fear response in zebrafish and that zebrafish quickly adjust their behavior to avoid the predator's attacks. The augmented degree of interactivity afforded by the Markov-chain-dependent actuation of the replica constitutes a fundamental advancement in the study of animal-robot interactions and offers a new means for the development of experimental paradigms to study fear.
斑马鱼()是研究情绪反应(如恐惧和焦虑)生物学决定因素的宝贵实验物种。传统上,与恐惧相关的测试范式需要重点研究对象与活的捕食者之间的相互作用,而在整个实验过程中,捕食者的行为可能不一致。为应对这一技术挑战,机器人刺激现在经常被整合到行为研究中,从而产生可重复、可定制和可控的实验条件。虽然大多数研究都集中在开环控制上,即机器人刺激被预先编程以执行先验已知的动作,但最近的工作已经探索了机器人刺激与活体对象之间双向相互作用的可能性。在这里,我们展示了一个“闭环控制”系统来研究斑马鱼的恐惧反应,其中机器人刺激的反应是通过一个有限状态马尔可夫链实时确定的,该链基于对斑马鱼与其捕食者之间相互作用的独立观察构建而成。具体来说,我们设计了一种3D打印的斑马鱼异域捕食者红老虎奥斯卡鱼()的机器人复制品,并对其进行了实时与活体对象互动的仪器化设计。我们通过分析焦点鱼的行为图谱以及对对象与复制品之间相互作用的信息论量化,研究了闭环控制在调节斑马鱼恐惧反应中的作用。我们的结果表明,闭环控制在斑马鱼中引发了一致的恐惧反应,并且斑马鱼会迅速调整其行为以避免捕食者的攻击。复制品基于马尔可夫链的驱动所带来的增强的交互程度,构成了动物 - 机器人相互作用研究的一项重大进展,并为开发研究恐惧的实验范式提供了一种新方法。