Yang Yanpeng, Clément Romain J G, Ghirlanda Stefano, Porfiri Maurizio
Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, School of Mechanical Engineering, Tianjin University, Tianjin, China.
Department of Mechanical and Aerospace Engineering, New York University, Tandon School of Engineering, Brooklyn, NY, United States.
Front Robot AI. 2019 Aug 14;6:71. doi: 10.3389/frobt.2019.00071. eCollection 2019.
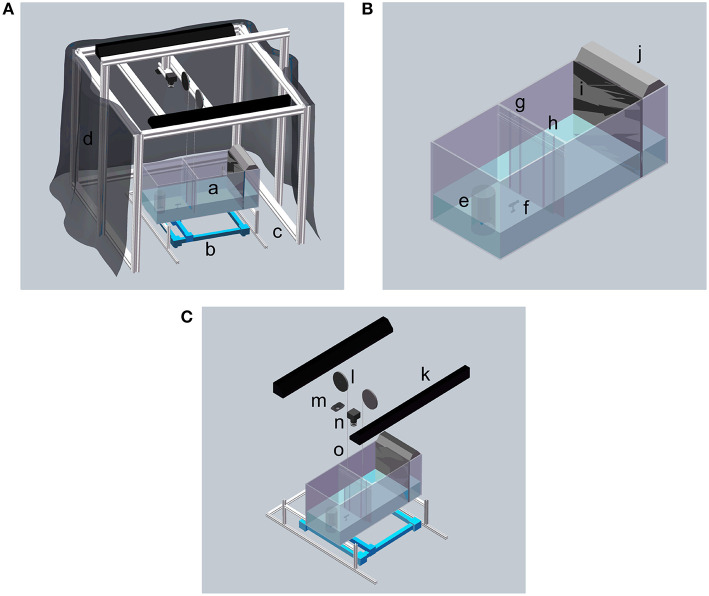
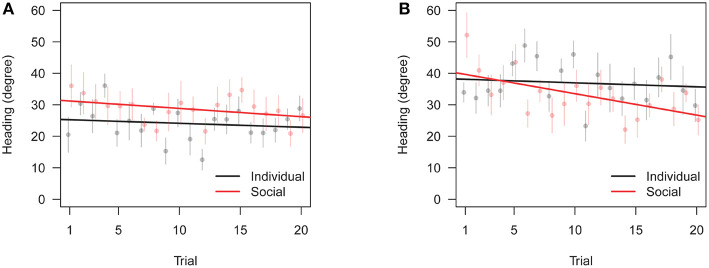
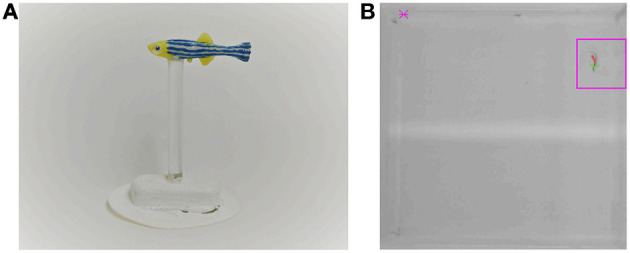
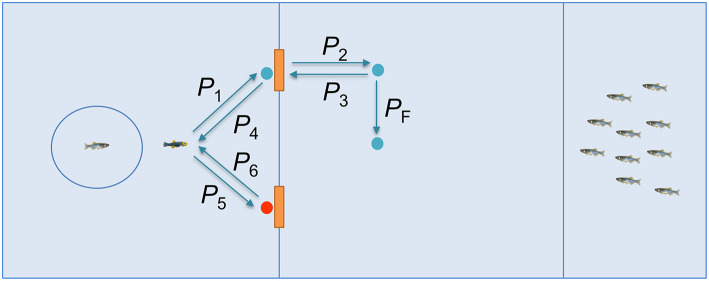
Social learning is ubiquitous across the animal kingdom, where animals learn from group members about predators, foraging strategies, and so on. Despite its prevalence and adaptive benefits, our understanding of social learning is far from complete. Here, we study observational learning in zebrafish, a popular animal model in neuroscience. Toward fine control of experimental variables and high consistency across trials, we developed a novel robotics-based experimental test paradigm, in which a robotic replica demonstrated to live subjects the correct door to join a group of conspecifics. We performed two experimental conditions. In the individual training condition, subjects learned the correct door without the replica. In the social training condition, subjects observed the replica approaching both the incorrect door, to no effect, and the correct door, which would open after spending enough time close to it. During these observations, subjects could not actively follow the replica. Zebrafish increased their preference for the correct door over the course of 20 training sessions, but we failed to identify evidence of social learning, whereby we did not register significant differences in performance between the individual and social training conditions. These results suggest that zebrafish may not be able to learn a route by observation, although more research comparing robots to live demonstrators is needed to substantiate this claim.
社会学习在动物界无处不在,动物们从群体成员那里学习有关捕食者、觅食策略等方面的知识。尽管社会学习普遍存在且具有适应性益处,但我们对它的理解还远未完善。在此,我们研究斑马鱼的观察性学习,斑马鱼是神经科学中一种常用的动物模型。为了精确控制实验变量并确保各试验之间具有高度一致性,我们开发了一种基于机器人技术的新型实验测试范式,在该范式中,一个机器人复制品向活体实验对象展示通往一群同种个体的正确门。我们进行了两种实验条件。在个体训练条件下,实验对象在没有复制品的情况下学习正确的门。在社会训练条件下,实验对象观察复制品接近错误的门(无效果)以及正确的门(在靠近足够长时间后会打开)。在这些观察过程中,实验对象无法主动跟随复制品。斑马鱼在20次训练过程中增加了对正确门的偏好,但我们未能找到社会学习的证据,也就是说,我们没有记录到个体训练条件和社会训练条件在表现上的显著差异。这些结果表明斑马鱼可能无法通过观察学习路线,不过还需要更多将机器人与活体示范者进行比较的研究来证实这一说法。