Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, 77 Massachusetts Ave, Cambridge, MA 02139, USA.
Department of Mechanical Engineering, Massachusetts Institute of Technology, 77 Massachusetts Ave, Cambridge, MA 02139, USA.
Sensors (Basel). 2018 Feb 5;18(2):467. doi: 10.3390/s18020467.
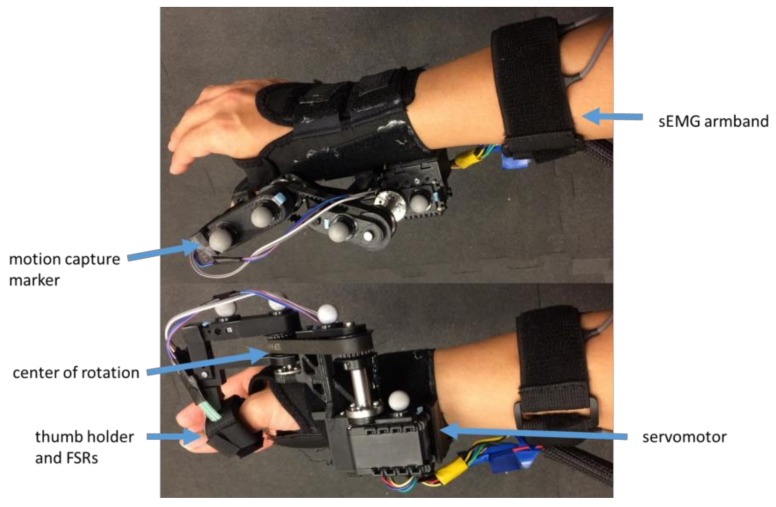
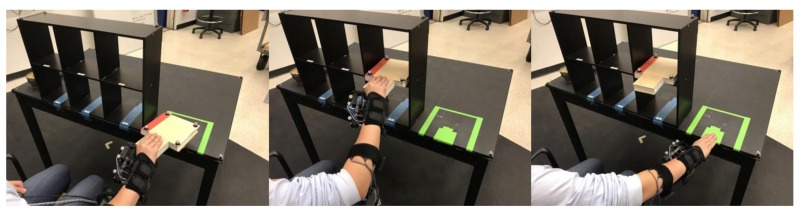
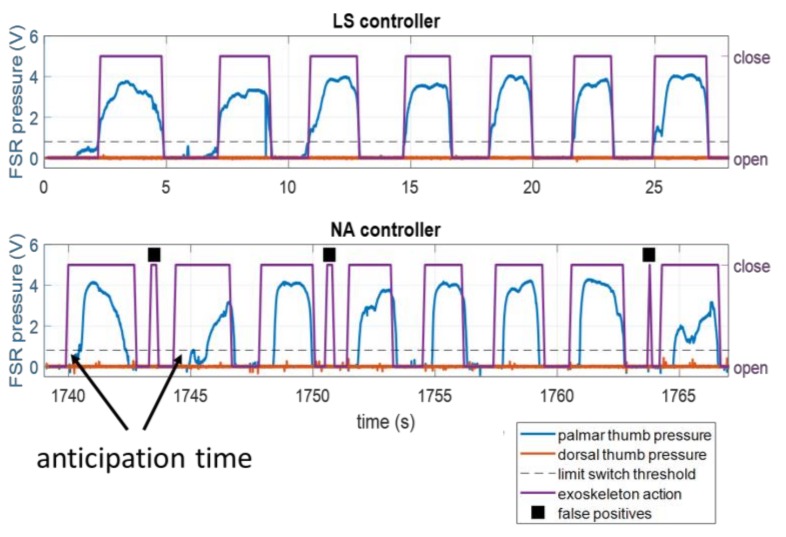
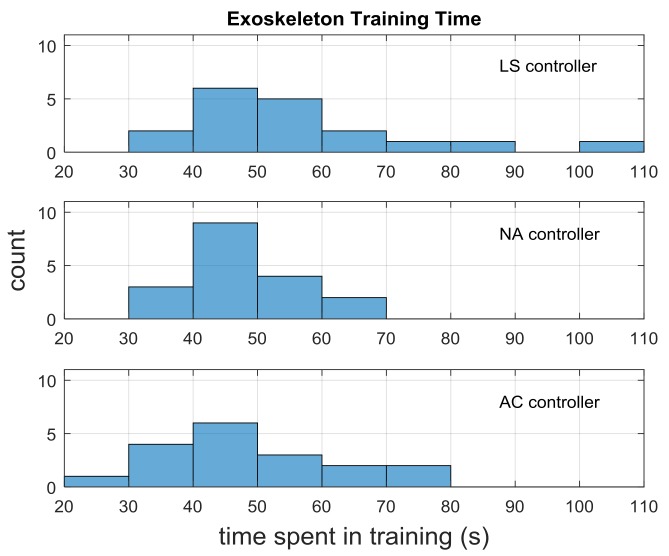
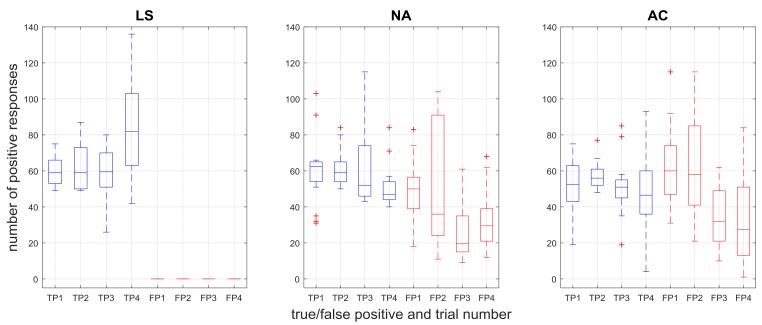
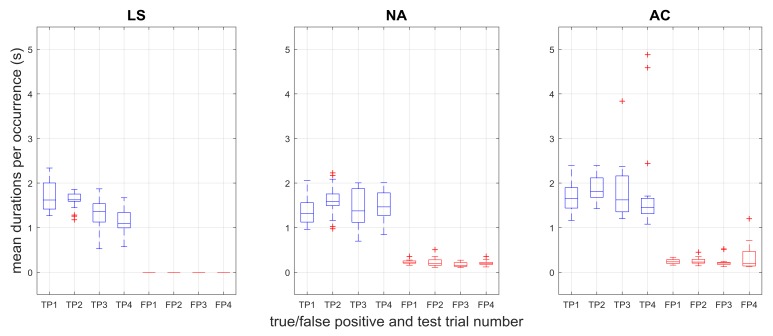
Upper-extremity exoskeletons have demonstrated potential as augmentative, assistive, and rehabilitative devices. Typical control of upper-extremity exoskeletons have relied on switches, force/torque sensors, and surface electromyography (sEMG), but these systems are usually reactionary, and/or rely on entirely hand-tuned parameters. sEMG-based systems may be able to provide anticipatory control, since they interface directly with muscle signals, but typically require expert placement of sensors on muscle bodies. We present an implementation of an adaptive sEMG-based exoskeleton controller that learns a mapping between muscle activation and the desired system state during interaction with a user, generating a personalized sEMG feature classifier to allow for anticipatory control. This system is robust to novice placement of sEMG sensors, as well as subdermal muscle shifts. We validate this method with 18 subjects using a thumb exoskeleton to complete a book-placement task. This learning-from-demonstration system for exoskeleton control allows for very short training times, as well as the potential for improvement in intent recognition over time, and adaptation to physiological changes in the user, such as those due to fatigue.
上肢外骨骼已被证明具有增强、辅助和康复的潜力。典型的上肢外骨骼控制依赖于开关、力/扭矩传感器和表面肌电图 (sEMG),但这些系统通常是反应性的,并且/或者依赖于完全手动调整的参数。基于 sEMG 的系统可能能够提供预测控制,因为它们直接与肌肉信号接口,但通常需要专家在肌肉体上放置传感器。我们提出了一种自适应基于 sEMG 的外骨骼控制器的实现,该控制器在与用户交互时学习肌肉激活与期望系统状态之间的映射,生成个性化的 sEMG 特征分类器以实现预测控制。该系统对 sEMG 传感器的新手放置以及皮下肌肉移位具有鲁棒性。我们使用拇指外骨骼在 18 名受试者上验证了这种外骨骼控制的演示学习方法,以完成书籍放置任务。这种外骨骼控制的从演示中学习的系统允许非常短的训练时间,以及随着时间的推移提高意图识别的潜力,以及适应用户的生理变化,例如由于疲劳引起的变化。