Department of Training and Movement Sciences, Humboldt-Universität zu Berlin, Berlin, 10115, Germany.
Berlin School of Movement Science, Humboldt-Universität zu Berlin, Berlin, Germany.
Sci Rep. 2018 Feb 9;8(1):2740. doi: 10.1038/s41598-018-21018-4.
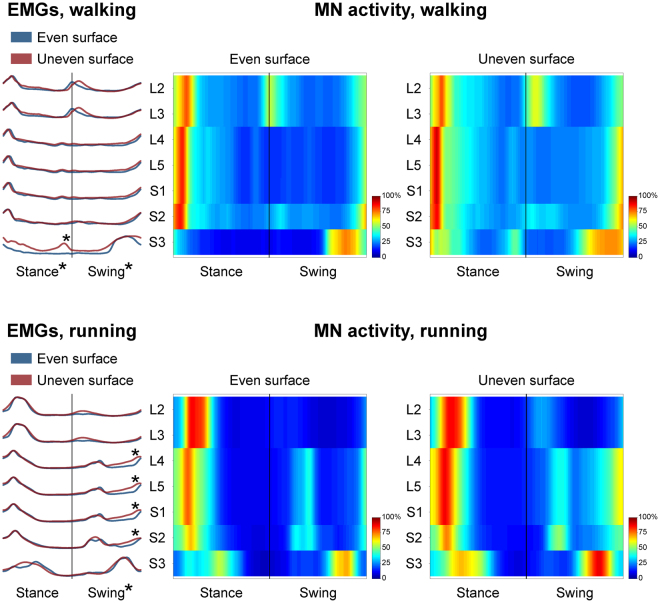
The need to move over uneven terrain is a daily challenge. In order to face unexpected perturbations due to changes in the morphology of the terrain, the central nervous system must flexibly modify its control strategies. We analysed the local dynamic stability and the modular organisation of muscle activation (muscle synergies) during walking and running on an even- and an uneven-surface treadmill. We hypothesized a reduced stability during uneven-surface locomotion and a reorganisation of the modular control. We found a decreased stability when switching from even- to uneven-surface locomotion (p < 0.001 in walking, p = 0.001 in running). Moreover, we observed a substantial modification of the time-dependent muscle activation patterns (motor primitives) despite a general conservation of the time-independent coefficients (motor modules). The motor primitives were considerably wider in the uneven-surface condition. Specifically, the widening was significant in both the early (+40.5%, p < 0.001) and late swing (+7.7%, p = 0.040) phase in walking and in the weight acceptance (+13.6%, p = 0.006) and propulsion (+6.0%, p = 0.041) phase in running. This widening highlighted an increased motor output's robustness (i.e. ability to cope with errors) when dealing with the unexpected perturbations. Our results confirmed the hypothesis that humans adjust their motor control strategies' timing to deal with unsteady locomotion.
在不平整的地形上移动是日常生活中的一项挑战。为了应对由于地形形态变化而产生的意外扰动,中枢神经系统必须灵活地修改其控制策略。我们分析了在平坦和不平坦跑步机上行走和跑步时的局部动态稳定性和肌肉激活(肌肉协同作用)的模块化组织。我们假设在不平坦表面上运动时稳定性降低,并且模块化控制重新组织。当从平坦表面切换到不平坦表面时,我们发现稳定性降低(行走时 p < 0.001,跑步时 p = 0.001)。此外,尽管时间独立系数(运动模块)普遍保持不变,但我们观察到时间依赖性肌肉激活模式(运动基元)的实质性变化。在不平坦表面条件下,运动基元要宽得多。具体来说,在行走的早期(+40.5%,p < 0.001)和晚期摆动(+7.7%,p = 0.040)阶段以及在跑步的重量接受(+13.6%,p = 0.006)和推进(+6.0%,p = 0.041)阶段,这种变宽都非常显著。这种变宽突出了在处理意外扰动时增加了运动输出的稳健性(即应对错误的能力)。我们的结果证实了这样一种假设,即人类调整其运动控制策略的时间,以应对不稳定的运动。