Bandara D S V, Arata Jumpei, Kiguchi Kazuo
System Engineering Laboratory, Department of Mechanical Engineering, Kyushu University, Fukuoka 819-0395, Japan.
Bioengineering (Basel). 2018 Mar 22;5(2):26. doi: 10.3390/bioengineering5020026.
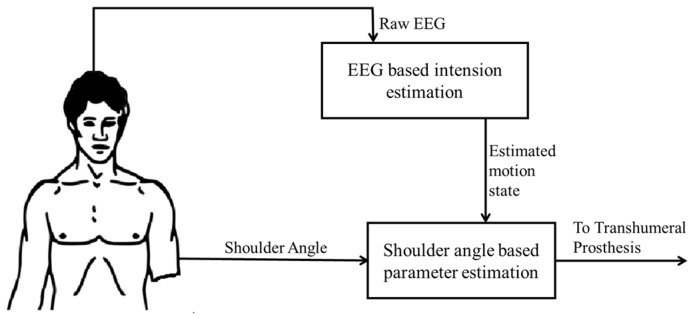
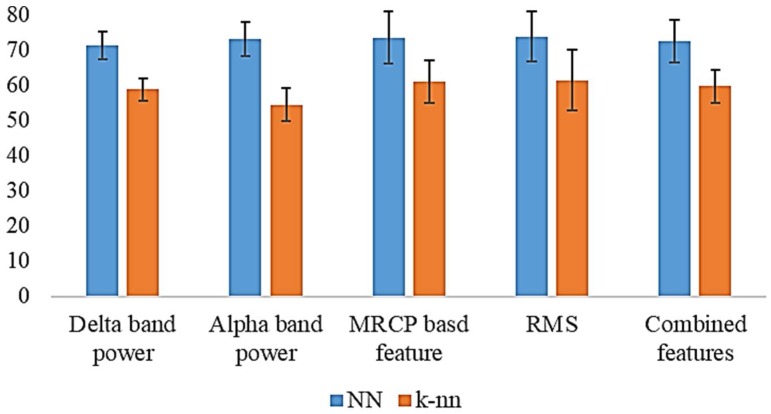
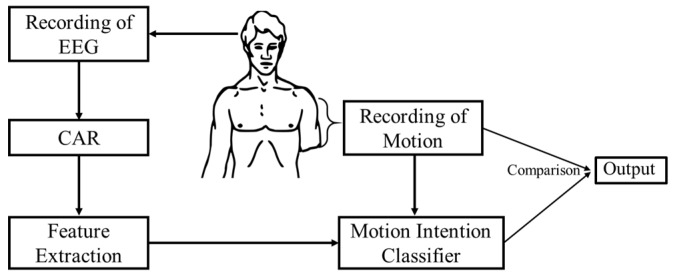
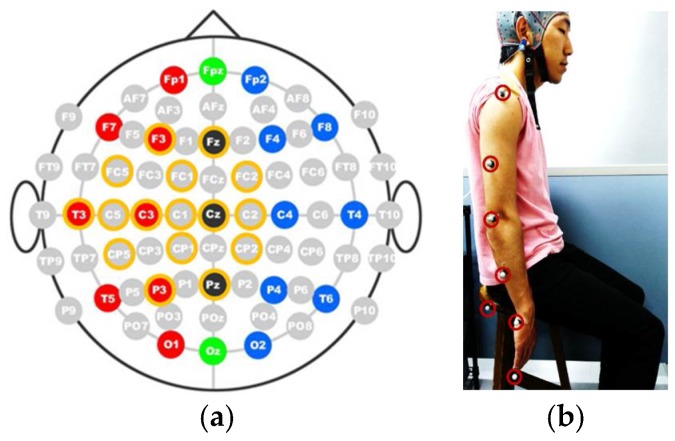
Robotic prostheses are expected to allow amputees greater freedom and mobility. However, available options to control transhumeral prostheses are reduced with increasing amputation level. In addition, for electromyography-based control of prostheses, the residual muscles alone cannot generate sufficiently different signals for accurate distal arm function. Thus, controlling a multi-degree of freedom (DoF) transhumeral prosthesis is challenging with currently available techniques. In this paper, an electroencephalogram (EEG)-based hierarchical two-stage approach is proposed to achieve multi-DoF control of a transhumeral prosthesis. In the proposed method, the motion intention for arm reaching or hand lifting is identified using classifiers trained with motion-related EEG features. For this purpose, neural network and -nearest neighbor classifiers are used. Then, elbow motion and hand endpoint motion is estimated using a different set of neural-network-based classifiers, which are trained with motion information recorded using healthy subjects. The predictions from the classifiers are compared with residual limb motion to generate a final prediction of motion intention. This can then be used to realize multi-DoF control of a prosthesis. The experimental results show the feasibility of the proposed method for multi-DoF control of a transhumeral prosthesis. This proof of concept study was performed with healthy subjects.
机器人假肢有望让截肢者获得更大的行动自由和灵活性。然而,随着截肢水平的提高,控制经肱骨假肢的现有选择会减少。此外,对于基于肌电图的假肢控制,仅靠残余肌肉无法产生足够不同的信号来实现精确的手臂远端功能。因此,用目前的现有技术控制多自由度(DoF)经肱骨假肢具有挑战性。本文提出了一种基于脑电图(EEG)的分层两阶段方法,以实现对经肱骨假肢的多自由度控制。在所提出的方法中,使用通过与运动相关的脑电图特征训练的分类器来识别手臂伸展或手部抬起的运动意图。为此,使用了神经网络和最近邻分类器。然后,使用另一组基于神经网络的分类器估计肘部运动和手部端点运动,这些分类器是通过使用健康受试者记录的运动信息进行训练的。将分类器的预测结果与残肢运动进行比较,以生成运动意图的最终预测。然后,这可用于实现对假肢的多自由度控制。实验结果表明了所提出的方法用于经肱骨假肢多自由度控制的可行性。这项概念验证研究是在健康受试者身上进行的。