Sivčev Satja, Rossi Matija, Coleman Joseph, Omerdić Edin, Dooly Gerard, Toal Daniel
MaREI - Marine and Renewable Energy Ireland, Cork, Ireland.
Department of Electronic and Computer Engineering, University of Limerick, Limerick, Ireland.
Sensors (Basel). 2018 Apr 6;18(4):1117. doi: 10.3390/s18041117.
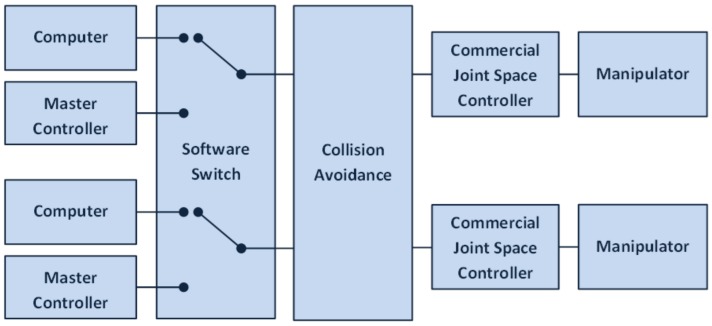
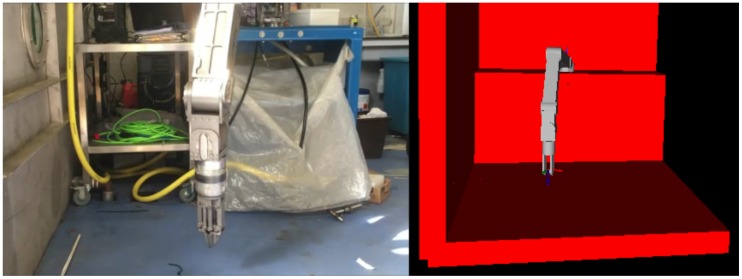
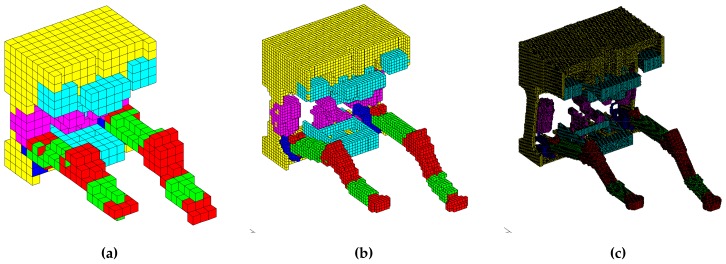
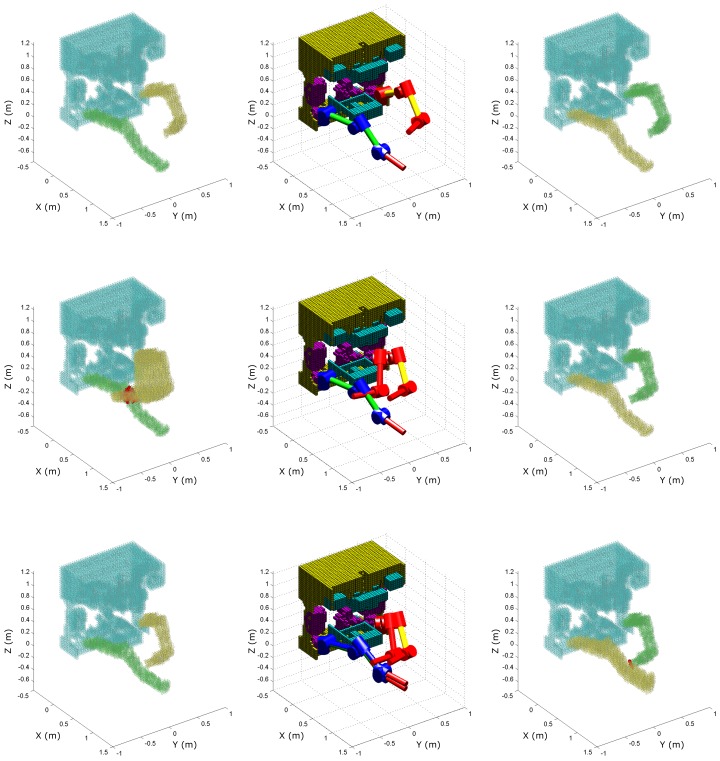
Work-class ROVs equipped with robotic manipulators are extensively used for subsea intervention operations. Manipulators are teleoperated by human pilots relying on visual feedback from the worksite. Operating in a remote environment, with limited pilot perception and poor visibility, manipulator collisions which may cause significant damage are likely to happen. This paper presents a real-time collision detection algorithm for marine robotic manipulation. The proposed collision detection mechanism is developed, integrated into a commercial ROV manipulator control system, and successfully evaluated in simulations and experimental setup using a real industry standard underwater manipulator. The presented collision sensing solution has a potential to be a useful pilot assisting tool that can reduce the task load, operational time, and costs of subsea inspection, repair, and maintenance operations.
配备机器人操纵器的作业级遥控水下机器人(ROV)广泛应用于海底干预作业。操纵器由人类飞行员通过依赖作业现场的视觉反馈进行遥控操作。在远程环境中操作,由于飞行员感知有限且能见度差,可能导致重大损坏的操纵器碰撞很可能发生。本文提出了一种用于海洋机器人操纵的实时碰撞检测算法。所提出的碰撞检测机制被开发出来,集成到一个商业ROV操纵器控制系统中,并使用真正的行业标准水下操纵器在模拟和实验设置中成功进行了评估。所提出的碰撞传感解决方案有可能成为一种有用的飞行员辅助工具,可减少海底检查、维修和维护作业的任务负荷、操作时间和成本。