Wang Yun-Ting, Peng Chao-Chung, Ravankar Ankit A, Ravankar Abhijeet
Department of Aeronautics and Astronautics, National Cheng Kung University, Tainan 701, Taiwan.
Division of Human Mechanical Systems and Design, Faculty of Engineering, Hokkaido University, Sapporo 060-8628, Japan.
Sensors (Basel). 2018 Apr 23;18(4):1294. doi: 10.3390/s18041294.
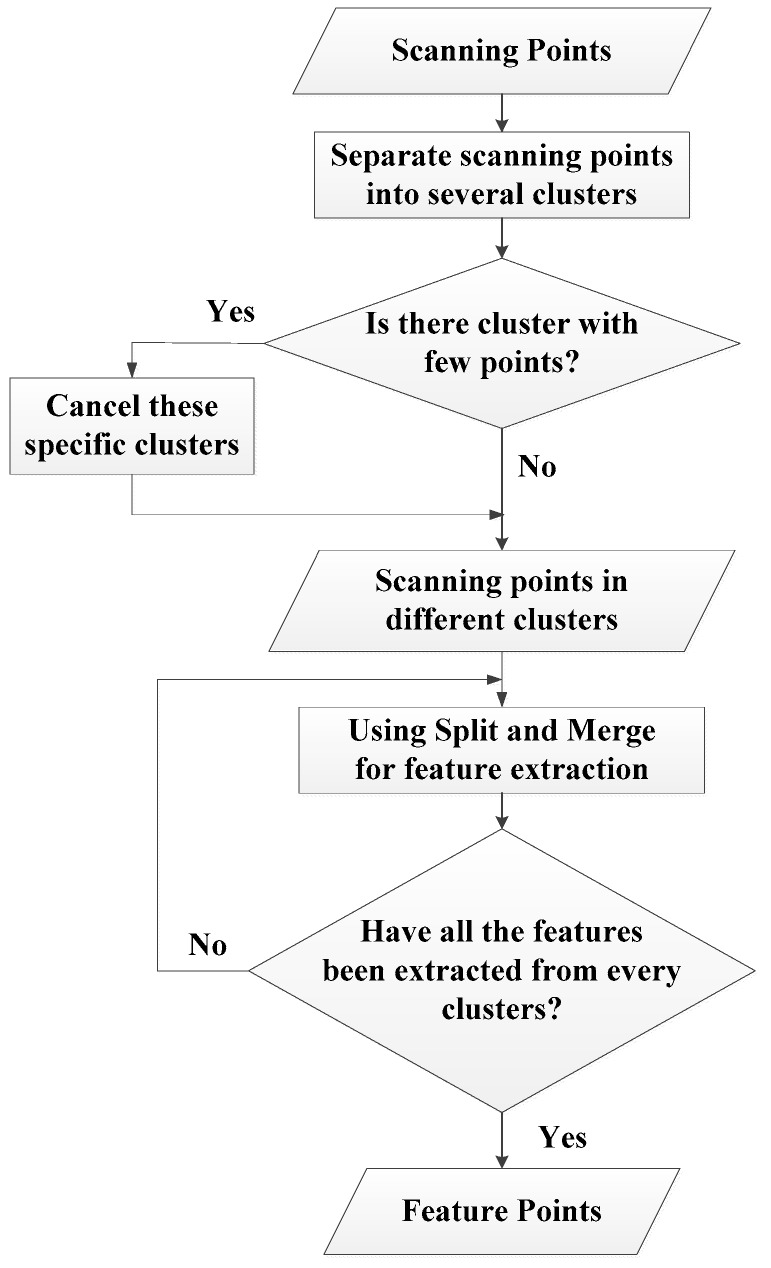
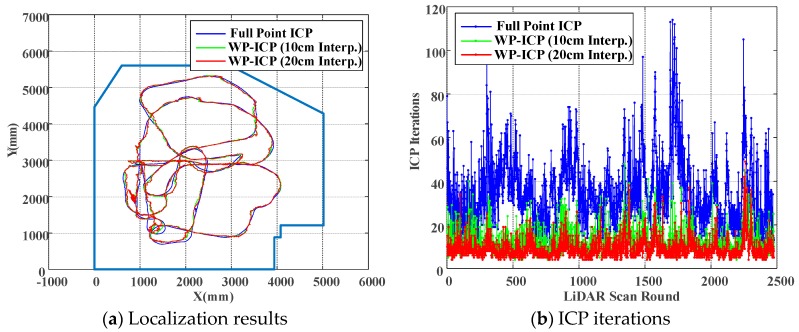
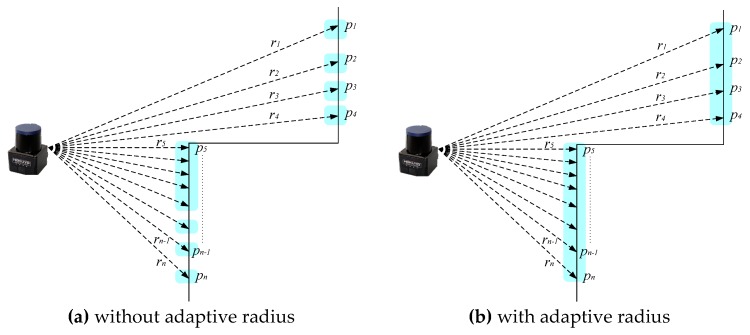
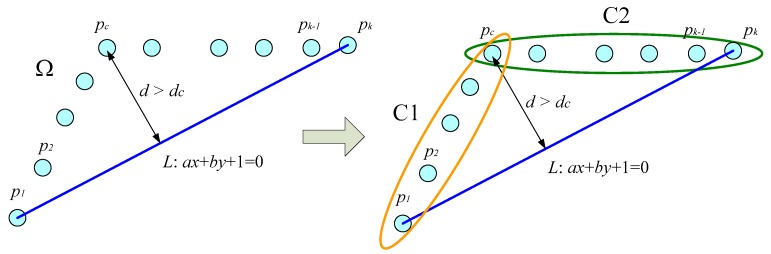
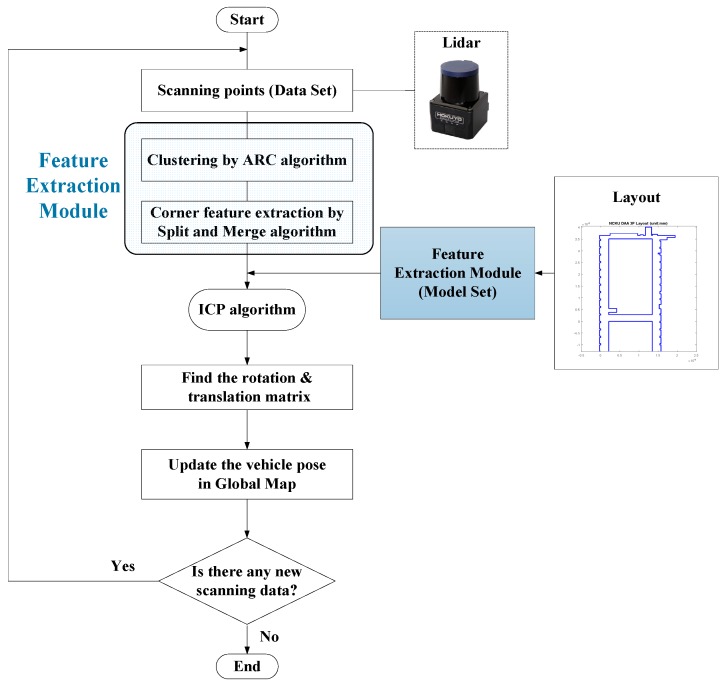
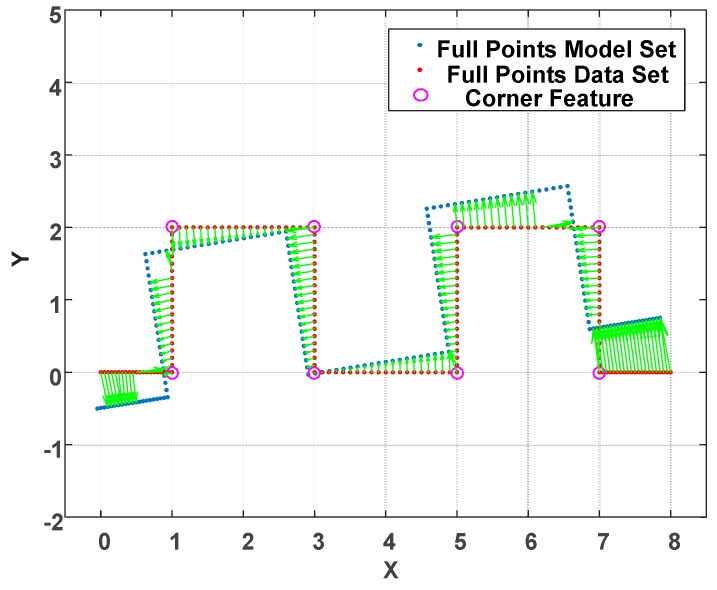
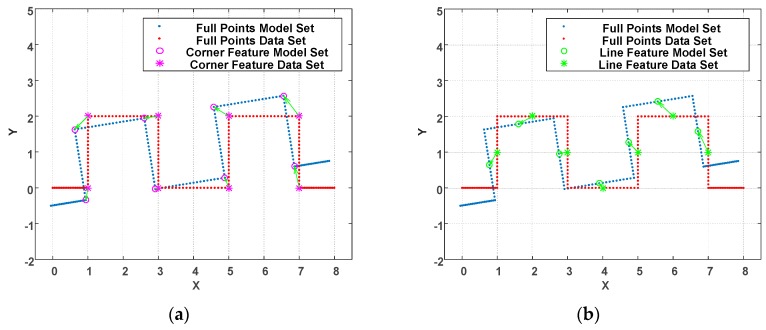
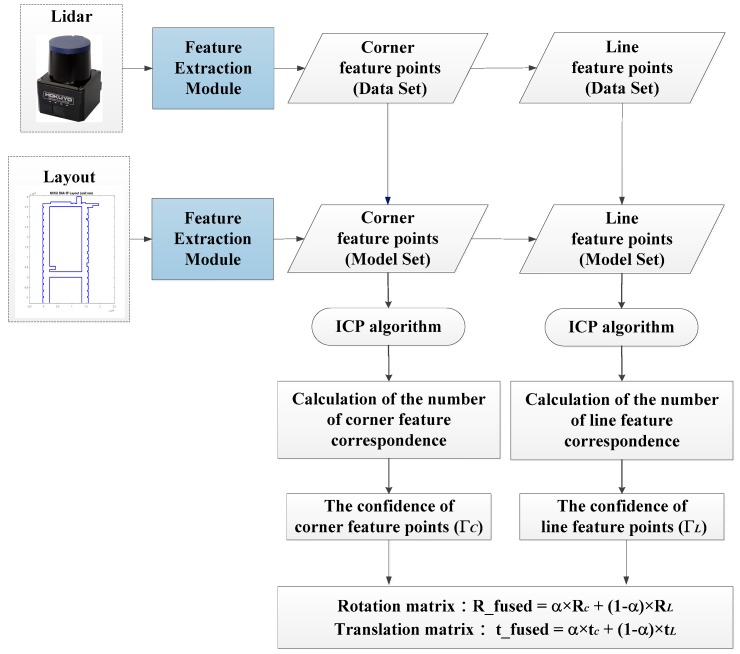
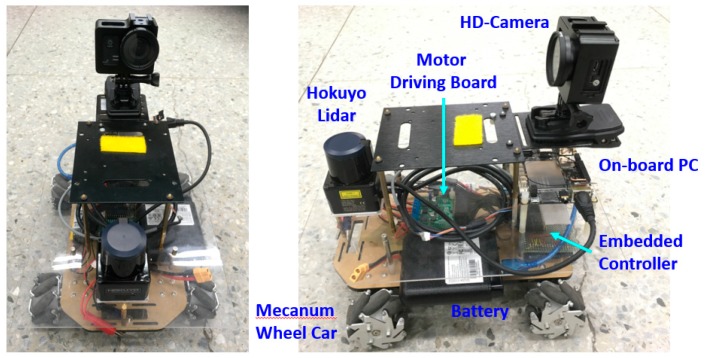
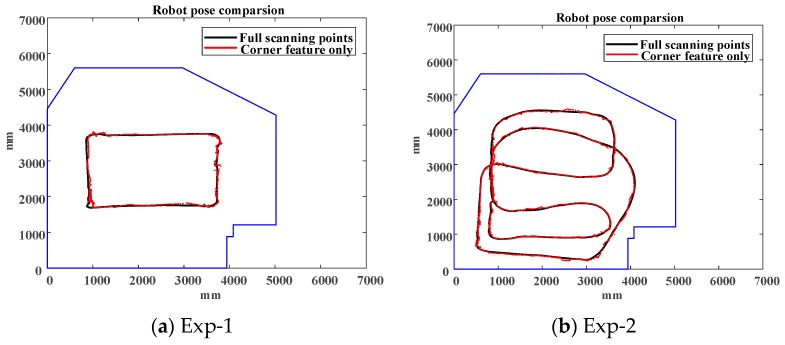
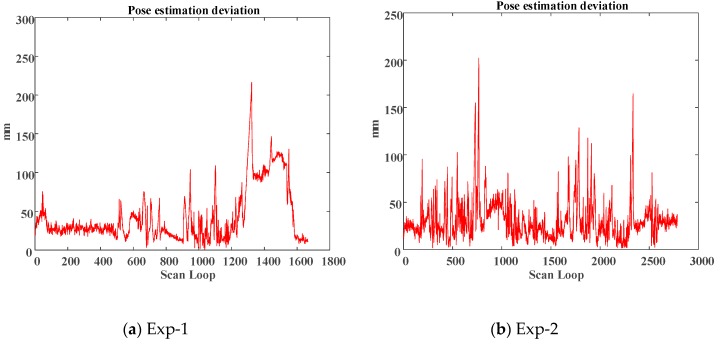
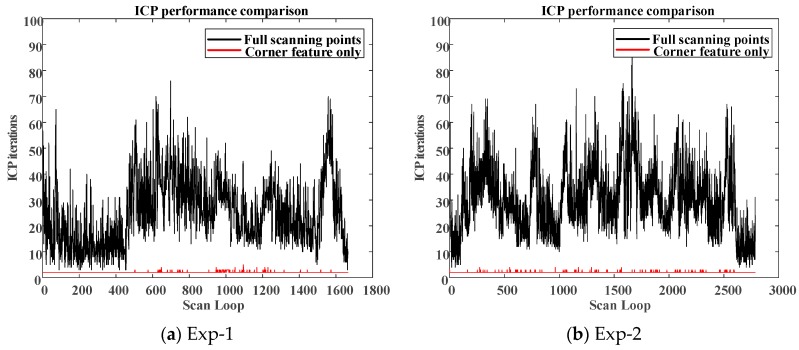
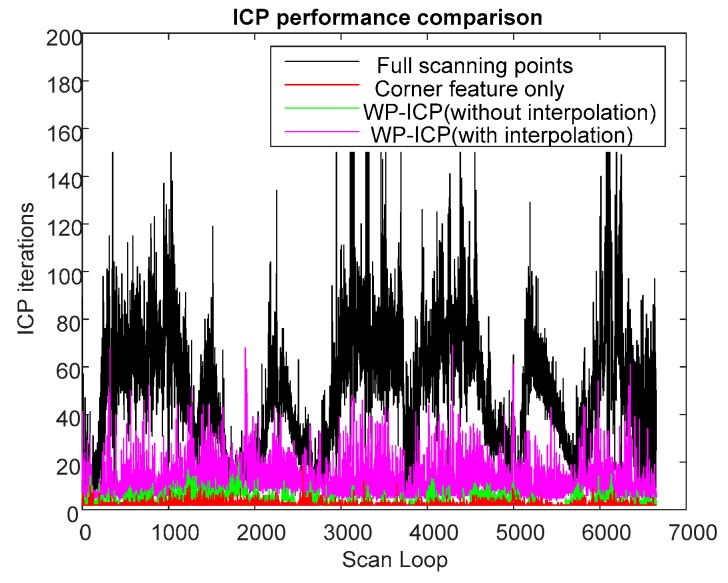
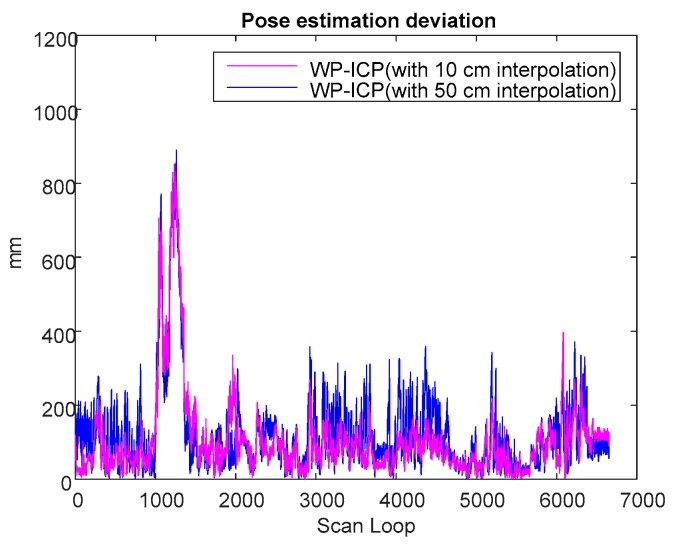
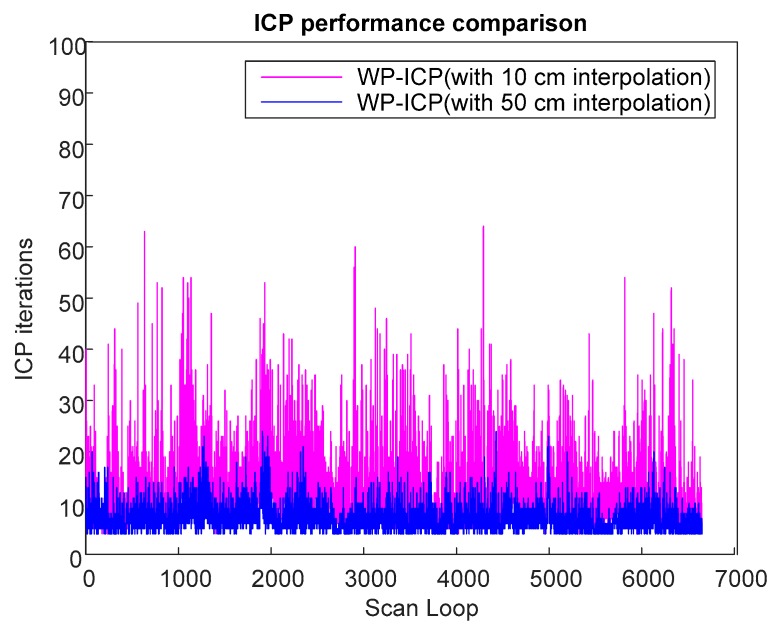
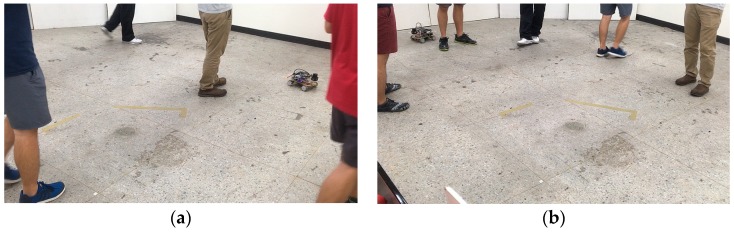
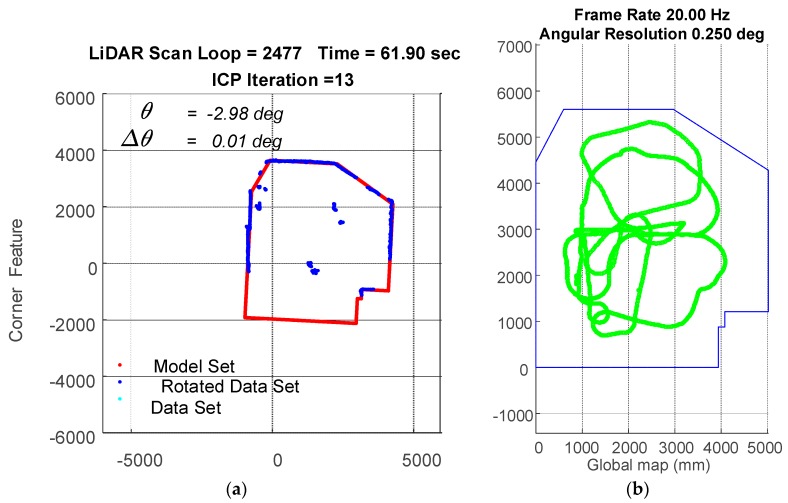
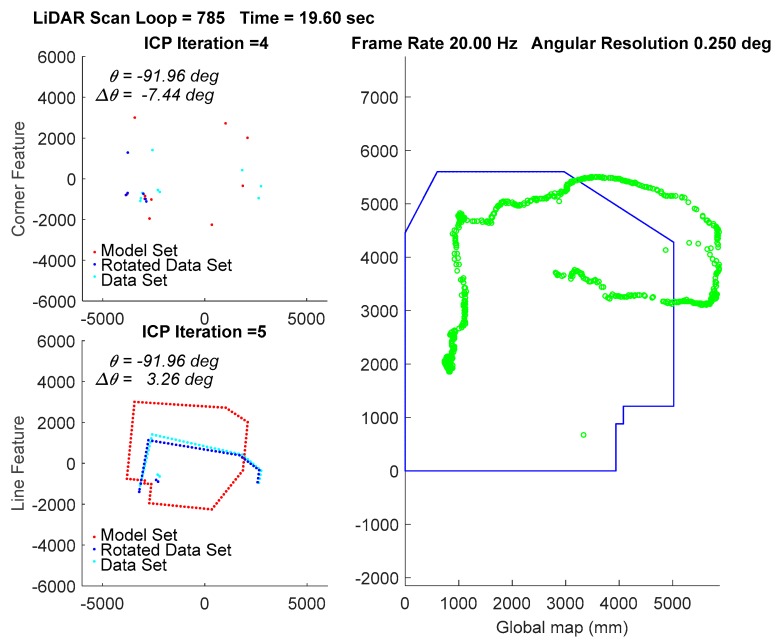
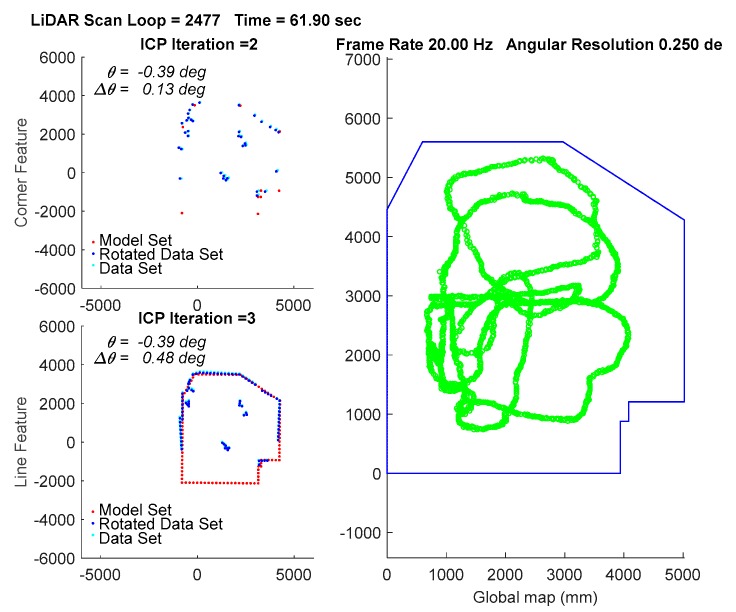
In past years, there has been significant progress in the field of indoor robot localization. To precisely recover the position, the robots usually relies on multiple on-board sensors. Nevertheless, this affects the overall system cost and increases computation. In this research work, we considered a light detection and ranging (LiDAR) device as the only sensor for detecting surroundings and propose an efficient indoor localization algorithm. To attenuate the computation effort and preserve localization robustness, a weighted parallel iterative closed point (WP-ICP) with interpolation is presented. As compared to the traditional ICP, the point cloud is first processed to extract corners and line features before applying point registration. Later, points labeled as corners are only matched with the corner candidates. Similarly, points labeled as lines are only matched with the lines candidates. Moreover, their ICP confidence levels are also fused in the algorithm, which make the pose estimation less sensitive to environment uncertainties. The proposed WP-ICP architecture reduces the probability of mismatch and thereby reduces the ICP iterations. Finally, based on given well-constructed indoor layouts, experiment comparisons are carried out under both clean and perturbed environments. It is shown that the proposed method is effective in significantly reducing computation effort and is simultaneously able to preserve localization precision.
在过去几年中,室内机器人定位领域取得了重大进展。为了精确恢复位置,机器人通常依赖多个车载传感器。然而,这会影响整个系统成本并增加计算量。在这项研究工作中,我们将激光探测与测距(LiDAR)设备视为检测周围环境的唯一传感器,并提出了一种高效的室内定位算法。为了减少计算量并保持定位鲁棒性,提出了一种带插值的加权并行迭代闭点(WP-ICP)算法。与传统的ICP相比,在应用点配准之前,先对点云进行处理以提取角点和线特征。之后,标记为角点的点仅与角点候选点进行匹配。同样,标记为线的点仅与线候选点进行匹配。此外,它们的ICP置信度水平也在算法中进行融合,这使得姿态估计对环境不确定性的敏感度降低。所提出的WP-ICP架构降低了不匹配的概率,从而减少了ICP迭代次数。最后,基于给定的精心构建的室内布局,在干净和受干扰的环境下进行了实验比较。结果表明,所提出的方法在显著减少计算量方面是有效的,并且同时能够保持定位精度。