Ilci Veli, Toth Charles
Department of Geomatics Engineering, Ondokuz Mayis University, 55139 Atakum, Turkey.
Department of Civil, Environmental and Geodetic Engineering, Ohio State University, Columbus, OH 43210, USA.
Sensors (Basel). 2020 Feb 7;20(3):899. doi: 10.3390/s20030899.
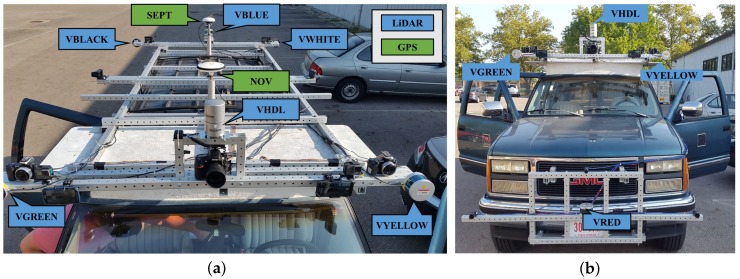
Recent developments in sensor technologies such as Global Navigation Satellite Systems (GNSS), Inertial Measurement Unit (IMU), Light Detection and Ranging (LiDAR), radar, and camera have led to emerging state-of-the-art autonomous systems, such as driverless vehicles or UAS (Unmanned Airborne Systems) swarms. These technologies necessitate the use of accurate object space information about the physical environment around the platform. This information can be generally provided by the suitable selection of the sensors, including sensor types and capabilities, the number of sensors, and their spatial arrangement. Since all these sensor technologies have different error sources and characteristics, rigorous sensor modeling is needed to eliminate/mitigate errors to obtain an accurate, reliable, and robust integrated solution. Mobile mapping systems are very similar to autonomous vehicles in terms of being able to reconstruct the environment around the platforms. However, they differ a lot in operations and objectives. Mobile mapping vehicles use professional grade sensors, such as geodetic grade GNSS, tactical grade IMU, mobile LiDAR, and metric cameras, and the solution is created in post-processing. In contrast, autonomous vehicles use simple/inexpensive sensors, require real-time operations, and are primarily interested in identifying and tracking moving objects. In this study, the main objective was to assess the performance potential of autonomous vehicle sensor systems to obtain high-definition maps based on only using Velodyne sensor data for creating accurate point clouds. In other words, no other sensor data were considered in this investigation. The results have confirmed that cm-level accuracy can be achieved.
全球导航卫星系统(GNSS)、惯性测量单元(IMU)、光探测与测距(LiDAR)、雷达和摄像头等传感器技术的最新发展催生了诸如无人驾驶车辆或无人机群等新兴的先进自主系统。这些技术需要使用有关平台周围物理环境的精确目标空间信息。通常可以通过适当选择传感器来提供此信息,包括传感器类型和功能、传感器数量及其空间布局。由于所有这些传感器技术都有不同的误差源和特性,因此需要进行严格的传感器建模以消除/减轻误差,从而获得准确、可靠且稳健的集成解决方案。移动测绘系统在能够重建平台周围环境方面与自动驾驶车辆非常相似。然而,它们在操作和目标方面有很大差异。移动测绘车辆使用专业级传感器,如大地测量级GNSS、战术级IMU、移动LiDAR和测量相机,并且解决方案是在后期处理中创建的。相比之下,自动驾驶车辆使用简单/廉价的传感器,需要实时操作,并且主要关注识别和跟踪移动物体。在本研究中,主要目标是评估自动驾驶车辆传感器系统仅使用Velodyne传感器数据创建精确点云以获取高清地图的性能潜力。换句话说,本研究未考虑其他传感器数据。结果证实可以实现厘米级精度。