Department of Biomedical Engineering, The Chinese University of Hong Kong, ShaTin, Hong Kong.
Department of Biomedical Engineering, The Hong Kong Polytechnic University, Hung Hom, Hong Kong.
J Neuroeng Rehabil. 2018 Jun 19;15(1):51. doi: 10.1186/s12984-018-0394-7.
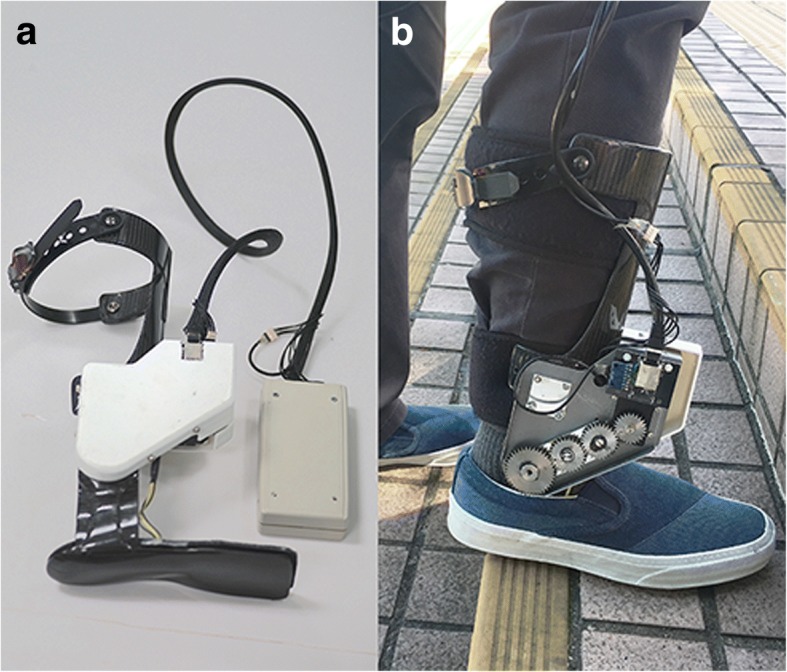
Robot-assisted ankle-foot-orthosis (AFO) can provide immediate powered ankle assistance in post-stroke gait training. Our research team has developed a novel lightweight portable robot-assisted AFO which is capable of detecting walking intentions using sensor feedback of wearer's gait pattern. This study aims to investigate the therapeutic effects of robot-assisted gait training with ankle dorsiflexion assistance.
This was a double-blinded randomized controlled trial. Nineteen chronic stroke patients with motor impairment at ankle participated in 20-session robot-assisted gait training for about five weeks, with 30-min over-ground walking and stair ambulation practices. Robot-assisted AFO either provided active powered ankle assistance during swing phase in Robotic Group (n = 9), or torque impedance at ankle joint as passive AFO in Sham Group (n = 10). Functional assessments were performed before and after the 20-session gait training with 3-month Follow-up. Primary outcome measure was gait independency assessed by Functional Ambulatory Category (FAC). Secondary outcome measures were clinical scores including Fugl-Meyer Assessment (FMA), Modified Ashworth Scale (MAS), Berg Balance Scale (BBS), Timed 10-Meter Walk Test (10MWT), Six-minute Walk Test (SMWT), supplemented by gait analysis. All outcome measures were performed in unassisted gait after patients had taken off the robot-assisted AFO. Repeated-measures analysis of covariance was conducted to test the group differences referenced to clinical scores before training.
After 20-session robot-assisted gait training with ankle dorsiflexion assistance, the active ankle assistance in Robotic Group induced changes in gait pattern with improved gait independency (all patients FAC ≥ 5 post-training and 3-month follow-up), motor recovery, walking speed, and greater confidence in affected side loading response (vertical ground reaction force + 1.49 N/kg, peak braking force + 0.24 N/kg) with heel strike instead of flat foot touch-down at initial contact (foot tilting + 1.91°). Sham Group reported reduction in affected leg range of motion (ankle dorsiflexion - 2.36° and knee flexion - 8.48°) during swing.
Robot-assisted gait training with ankle dorsiflexion assistance could improve gait independency and help stroke patients developing confidence in weight acceptance, but future development of robot-assisted AFO should consider more lightweight and custom-fit design.
ClinicalTrials.gov NCT02471248 . Registered 15 June 2015 retrospectively registered.
机器人辅助踝足矫形器(AFO)可以在脑卒中后步态训练中立即提供主动的踝关节辅助。我们的研究团队开发了一种新型的轻便便携式机器人辅助踝足矫形器,它可以通过检测穿戴者步态模式的传感器反馈来检测行走意图。本研究旨在探讨具有踝关节背屈辅助的机器人辅助步态训练的治疗效果。
这是一项双盲随机对照试验。19 名患有运动障碍的慢性脑卒中患者参与了 20 次机器人辅助步态训练,为期约五周,包括 30 分钟的地面行走和上下楼梯练习。机器人辅助 AFO 在摆动相期间为机器人组(n=9)提供主动动力踝关节辅助,或为假手术组(n=10)提供被动踝关节扭矩阻抗。在 20 次步态训练前后进行功能评估,并在 3 个月的随访时进行。主要结局测量是由功能性步行分类(FAC)评估的步态独立性。次要结局测量包括 Fugl-Meyer 评估(FMA)、改良 Ashworth 量表(MAS)、伯格平衡量表(BBS)、10 米步行测试(10MWT)、6 分钟步行测试(SMWT),并辅以步态分析。所有的结果测量都是在患者脱下机器人辅助 AFO 后进行的无辅助步行时进行的。采用重复测量协方差分析检验训练前与临床评分的组间差异。
在接受 20 次具有踝关节背屈辅助的机器人辅助步态训练后,机器人组的主动踝关节辅助改变了步态模式,提高了步态独立性(所有患者训练后和 3 个月随访时 FAC≥5),运动功能恢复,行走速度提高,对患侧负重反应的信心增强(垂直地面反作用力增加+1.49 N/kg,最大制动力增加+0.24 N/kg),初始接触时足跟触地而不是平足触地(足部倾斜增加+1.91°)。假手术组在摆动期报告患侧运动范围减小(踝关节背屈-2.36°和膝关节屈曲-8.48°)。
具有踝关节背屈辅助的机器人辅助步态训练可以提高步态独立性,并帮助脑卒中患者增强对承重的信心,但未来的机器人辅助 AFO 应考虑更轻便和定制的设计。
ClinicalTrials.gov NCT02471248。于 2015 年 6 月 15 日回顾性注册。