Liu Hua-Shui, Duan Sheng-Jun, Liu Shi-Dong, Jia Feng-Shuang, Zhu Li-Ming, Liu Min-Cen
Department of Traumatic Orthopedics, Third People's Hospital of Jinan, Jinan, China.
Int J Med Robot. 2018 Oct;14(5):e1927. doi: 10.1002/rcs.1927. Epub 2018 Jun 19.
The purpose of this study was to investigate the safety and efficacy of the combination of robot-assisted percutaneous screw placement and pelvic internal fixator (INFIX) for minimally invasive treatment of unstable anterior and posterior pelvic ring injuries.
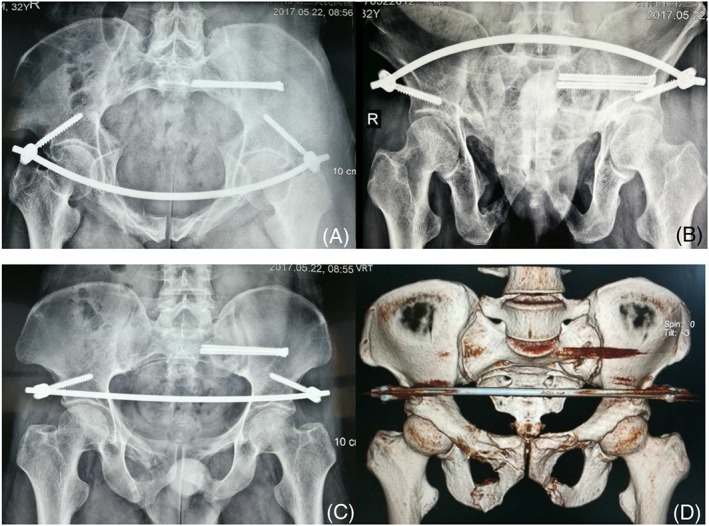
From September 2016 to June 2017, twenty-four patients with unstable anterior and posterior pelvic ring injuries were treated with TiRobot-assisted percutaneous sacroiliac cannulated screw fixation on the posterior pelvic ring combined with robot-assisted pedicle screw placement in the anterior inferior iliac spine along with INFIX on the anterior pelvic ring. The results of the treatment, including surgery duration, fluoroscopy frequency, total drilling, amount of blood loss, fracture healing time, and postoperative functional outcomes were recorded and compared with another 21 similar patients who underwent conventional manual positioning surgery.
The TiRobot group incurred significantly shorter duration of surgery; less fluoroscopy frequency, intraoperative bleeding, and total drilling than in the conventional group (P < 0.05). Postoperative radiological follow-up showed that all screws were in the safe area and no screw penetrated the cortex. All wounds healed by primary intention and no iatrogenic damage to the blood vessels, nerves, and organs occurred. Patients showed good tolerance to INFIX and reported no discomfort. The mean follow-up duration was 5.4 months; the fractures were all healed, no loss of reduction occurred, and the mean Majeed score at the last follow-up did not show any difference.
TiRobot-assisted percutaneous screw placement combined with INFIX for the anterior and posterior pelvic ring injuries is accurate, safe, less invasive, and shows satisfactory efficacy, suggesting it is a better method for minimally invasive treatment of unstable pelvic ring fractures.
本研究旨在探讨机器人辅助经皮螺钉置入联合骨盆内固定器(INFIX)微创治疗不稳定型骨盆前后环损伤的安全性和有效性。
2016年9月至2017年6月,对24例不稳定型骨盆前后环损伤患者采用TiRobot辅助经皮骶髂关节空心螺钉固定骨盆后环,联合机器人辅助在髂前下棘置入椎弓根螺钉以及骨盆前环INFIX固定。记录治疗结果,包括手术时间、透视次数、总钻孔次数、失血量、骨折愈合时间和术后功能结果,并与另外21例接受传统手工定位手术的类似患者进行比较。
TiRobot组手术时间明显短于传统组;透视次数、术中出血量和总钻孔次数均少于传统组(P<0.05)。术后影像学随访显示,所有螺钉均位于安全区域,无螺钉穿透皮质。所有伤口均一期愈合,未发生血管、神经和器官的医源性损伤。患者对INFIX耐受性良好,未报告不适。平均随访时间为5.4个月;骨折均愈合,无复位丢失,末次随访时平均Majeed评分无差异。
TiRobot辅助经皮螺钉置入联合INFIX治疗骨盆前后环损伤准确、安全、微创,疗效满意,是治疗不稳定型骨盆环骨折的较好微创方法。