Cohn Brian A, Szedlák May, Gärtner Bernd, Valero-Cuevas Francisco J
Department of Computer Science, University of Southern California, Los Angeles, CA, United States.
Department of Theoretical Computer Science, ETH Zurich, Zurich, Switzerland.
Front Comput Neurosci. 2018 Sep 11;12:62. doi: 10.3389/fncom.2018.00062. eCollection 2018.
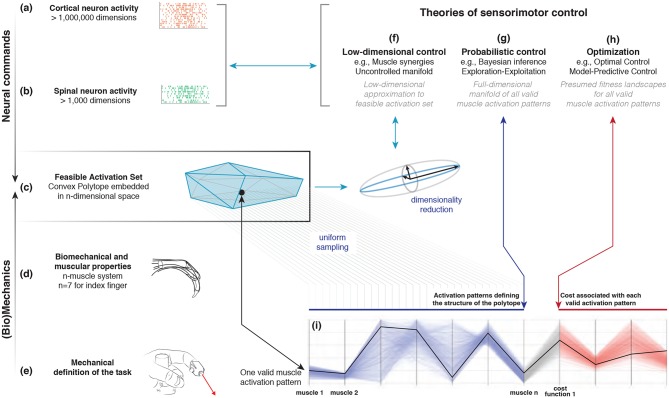
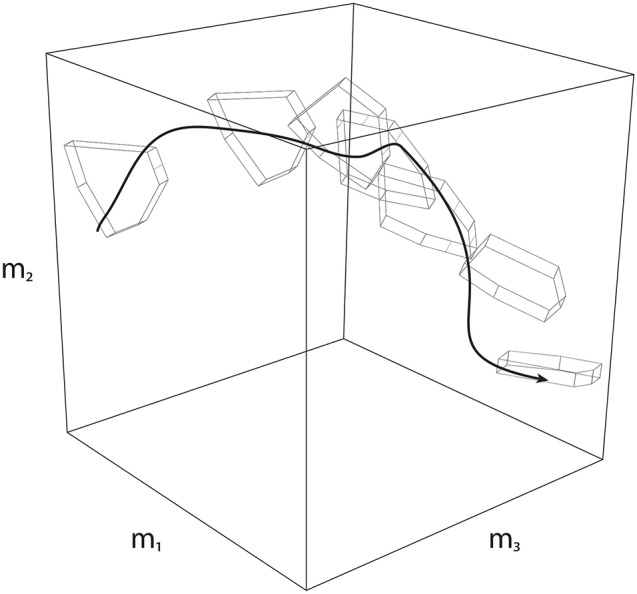
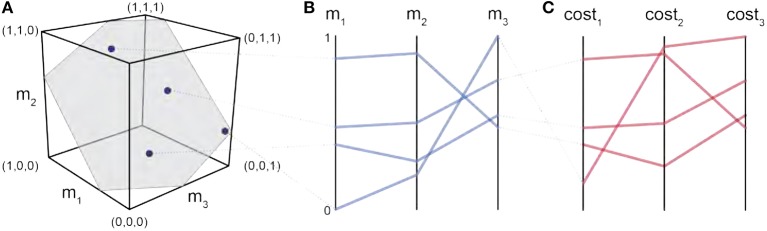
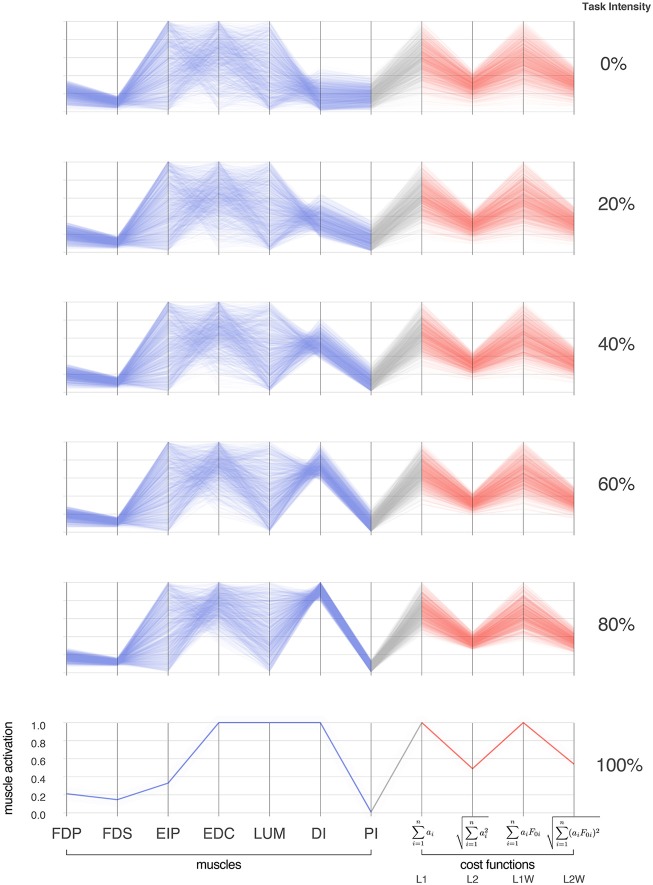
We present Feasibility Theory, a conceptual and computational framework to unify today's theories of neuromuscular control. We begin by describing how the musculoskeletal anatomy of the limb, the need to control individual tendons, and the physics of a motor task uniquely specify the family of all valid muscle activations that accomplish it (its 'feasible activation space'). For our example of producing static force with a finger driven by seven muscles, computational geometry characterizes-in a complete way-the structure of feasible activation spaces as 3-dimensional polytopes embedded in 7-D. The feasible activation space for a given task is landscape where all neuromuscular learning, control, and performance must occur. This approach unifies current theories of neuromuscular control because the structure of feasible activation spaces can be separately approximated as either low-dimensional basis functions (synergies), high-dimensional joint probability distributions (Bayesian priors), or fitness landscapes (to optimize cost functions).
我们提出了可行性理论,这是一个概念性和计算性框架,旨在统一当今的神经肌肉控制理论。我们首先描述肢体的肌肉骨骼解剖结构、控制单个肌腱的需求以及运动任务的物理学原理如何唯一地确定完成该任务的所有有效肌肉激活的集合(其“可行激活空间”)。以由七块肌肉驱动手指产生静力为例,计算几何学以完整的方式将可行激活空间的结构表征为嵌入七维空间的三维多面体。给定任务的可行激活空间是一个所有神经肌肉学习、控制和表现都必须发生的“景观”。这种方法统一了当前的神经肌肉控制理论,因为可行激活空间的结构可以分别近似为低维基函数(协同作用)、高维联合概率分布(贝叶斯先验)或适应度景观(以优化成本函数)。