Faculty of Robot Science and Engineering, Northeastern University, Shenyang 110819, China.
Sensors (Basel). 2018 Oct 6;18(10):3339. doi: 10.3390/s18103339.
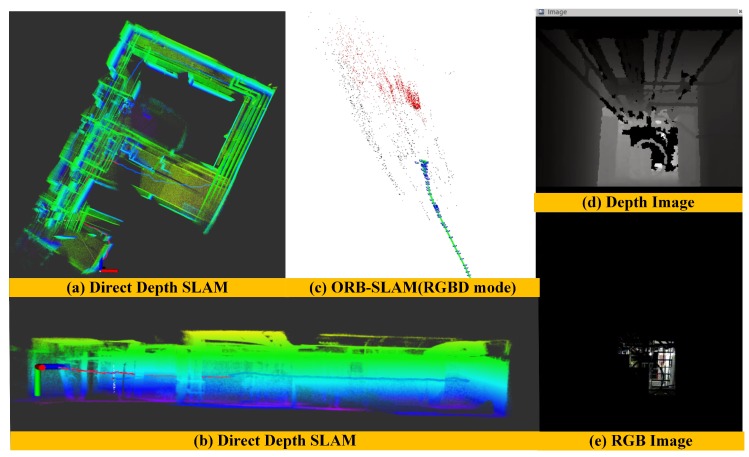
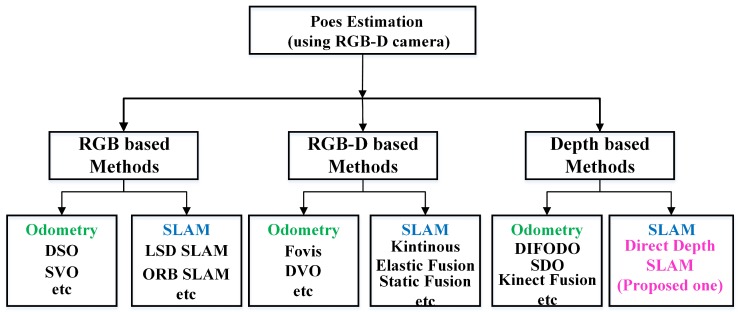
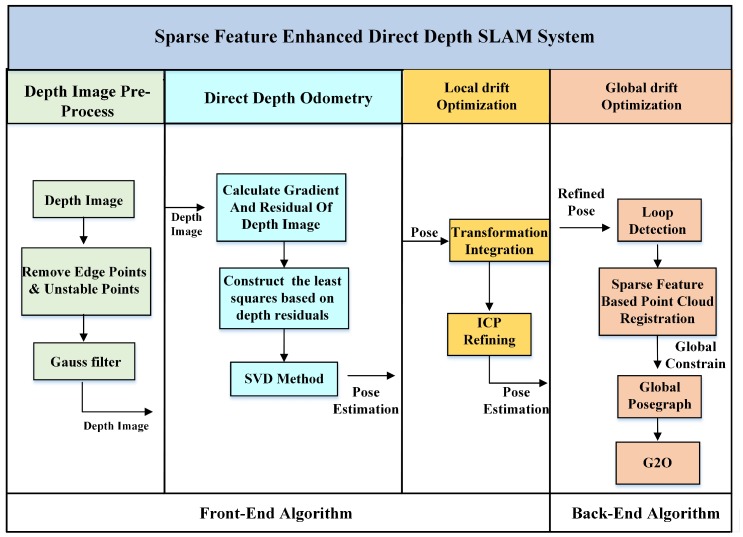
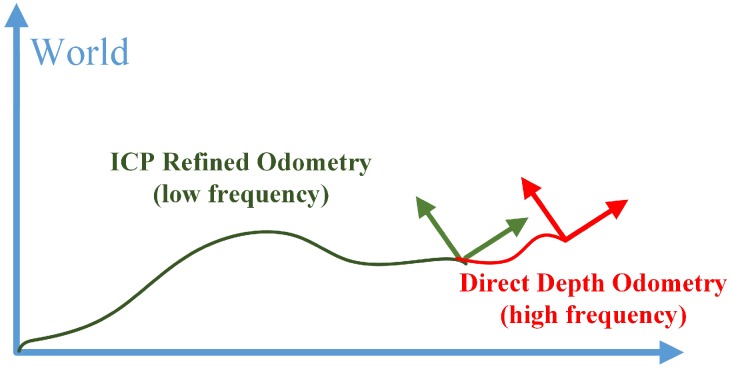
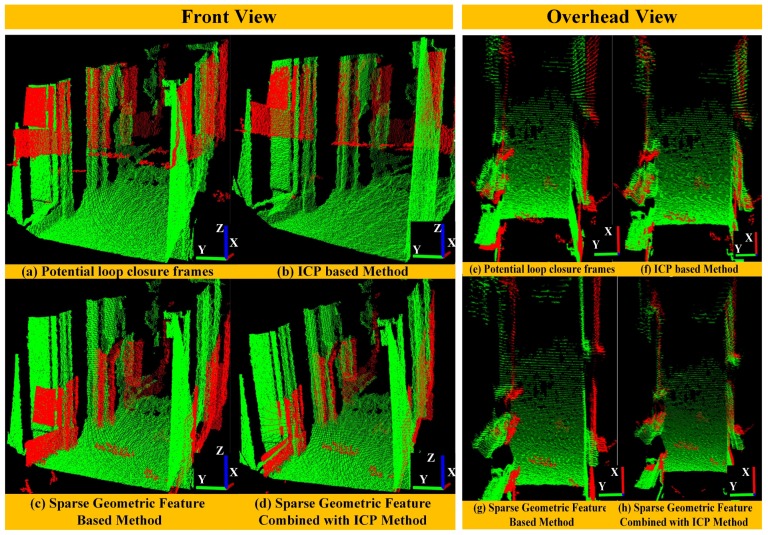
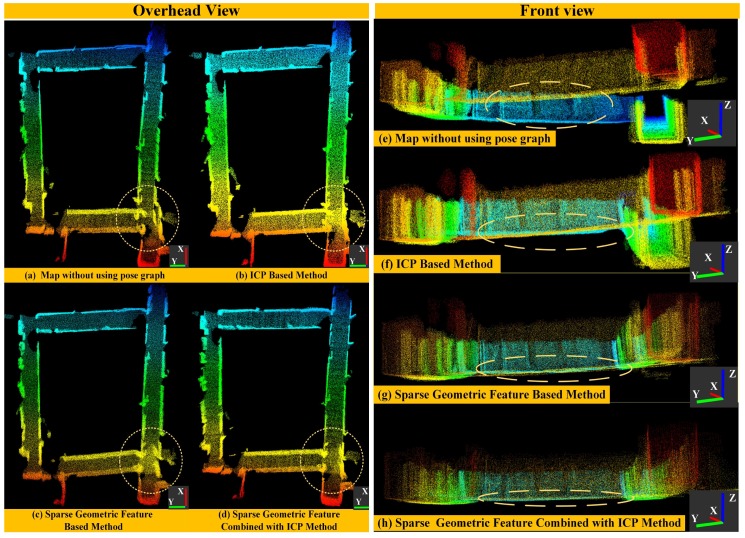
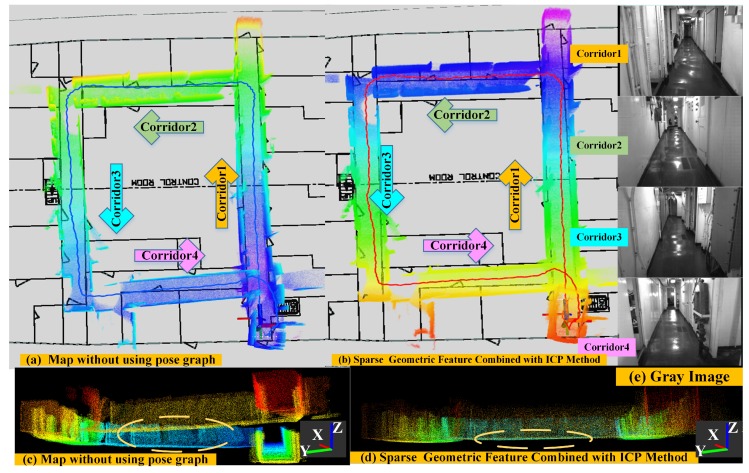
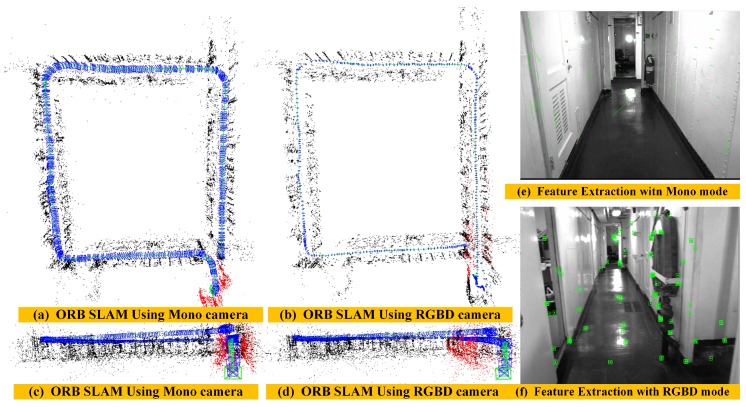
This paper presents a real-time, robust and low-drift depth-only SLAM (simultaneous localization and mapping) method for depth cameras by utilizing both dense range flow and sparse geometry features from sequential depth images. The proposed method is mainly composed of three optimization layers, namely Direct Depth layer, ICP (iterative closet point) Refined layer and Graph Optimization layer. The Direct Depth layer uses a range flow constraint equation to solve the fast 6-DOF (six degrees of freedom) frame-to-frame pose estimation problem. Then, the ICP Refined layer is used to reduce the local drift by applying local map based motion estimation strategy. After that, we propose a loop closure detection algorithm by extracting and matching sparse geometric features and construct a pose graph for the purpose of global pose optimization. We evaluate the performance of our method using benchmark datasets and real scene data. Experiment results show that our front-end algorithm clearly over performs the classic methods and our back-end algorithm is robust to find loop closures and reduce the global drift.
本文提出了一种实时、鲁棒且漂移小的基于深度相机的仅深度 SLAM(同时定位与建图)方法,该方法利用连续深度图像中的密集距离流和稀疏几何特征。所提出的方法主要由三个优化层组成,即直接深度层、ICP(迭代最近点)细化层和图优化层。直接深度层使用距离流约束方程来解决快速 6-DOF(六自由度)帧间姿态估计问题。然后,ICP 细化层通过应用基于局部地图的运动估计策略来减小局部漂移。之后,我们提出了一种通过提取和匹配稀疏几何特征来进行闭环检测的算法,并构建了一个姿态图,以进行全局姿态优化。我们使用基准数据集和真实场景数据来评估我们方法的性能。实验结果表明,我们的前端算法明显优于经典方法,而我们的后端算法能够稳健地找到闭环并减小全局漂移。