Chen Shengyang, Chang Ching-Wei, Wen Chih-Yung
Deptartment of Mechanical Engineering and Interdisciplinary Division of Aeronautical and Aviation Engineering, The Hong Kong Polytechnic University, Kowloon, Hong Kong.
Sensors (Basel). 2020 Feb 26;20(5):1263. doi: 10.3390/s20051263.
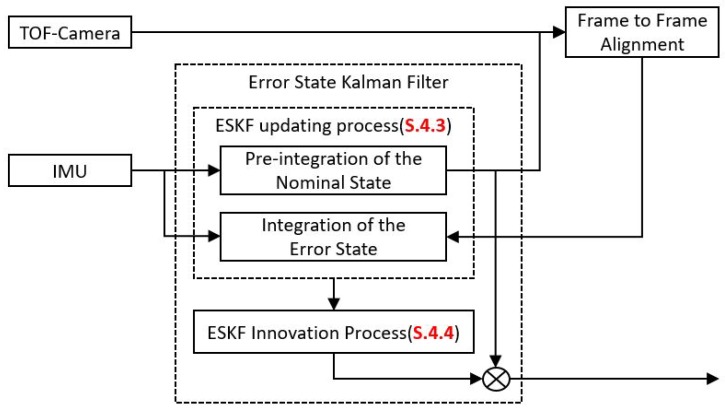
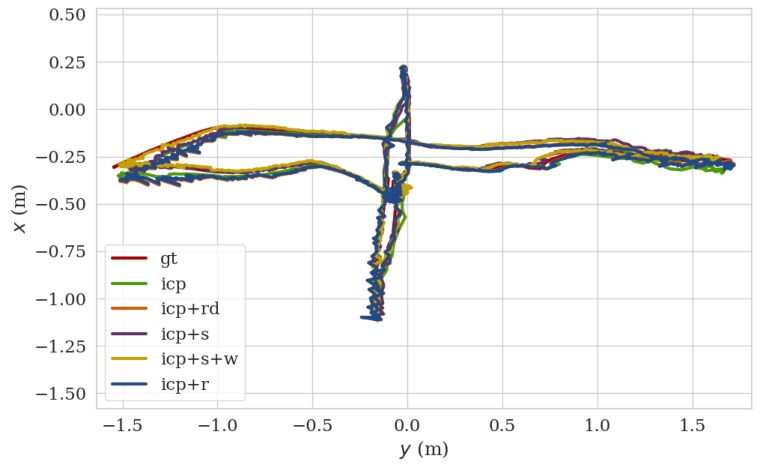
Visual inertial odometry (VIO) is the front-end of visual simultaneous localization and mapping (vSLAM) methods and has been actively studied in recent years. In this context, a time-of-flight (ToF) camera, with its high accuracy of depth measurement and strong resilience to ambient light of variable intensity, draws our interest. Thus, in this paper, we present a realtime visual inertial system based on a low cost ToF camera. The iterative closest point (ICP) methodology is adopted, incorporating salient point-selection criteria and a robustness-weighting function. In addition, an error-state Kalman filter is used and fused with inertial measurement unit (IMU) data. To test its capability, the ToF-VIO system is mounted on an unmanned aerial vehicle (UAV) platform and operated in a variable light environment. The estimated flight trajectory is compared with the ground truth data captured by a motion capture system. Real flight experiments are also conducted in a dark indoor environment, demonstrating good agreement with estimated performance. The current system is thus shown to be accurate and efficient for use in UAV applications in dark and Global Navigation Satellite System (GNSS)-denied environments.
视觉惯性里程计(VIO)是视觉同步定位与建图(vSLAM)方法的前端,近年来一直受到积极研究。在这种背景下,飞行时间(ToF)相机因其深度测量精度高且对强度可变的环境光具有较强的适应性而引起了我们的关注。因此,在本文中,我们提出了一种基于低成本ToF相机的实时视觉惯性系统。采用了迭代最近点(ICP)方法,并结合了显著点选择标准和鲁棒性加权函数。此外,使用了误差状态卡尔曼滤波器并与惯性测量单元(IMU)数据进行融合。为了测试其性能,将ToF-VIO系统安装在无人机(UAV)平台上,并在可变光照环境中运行。将估计的飞行轨迹与运动捕捉系统捕获的地面真值数据进行比较。还在黑暗的室内环境中进行了实际飞行实验,结果表明与估计性能吻合良好。因此,当前系统在黑暗和全球导航卫星系统(GNSS)信号受阻的环境中用于无人机应用时,显示出准确且高效的特点。