School of Electronics Engineering, College of IT Engineering, Kyungpook National University, 80 Daehakro, Bukgu, Daegu 702-701, Korea.
Center of Self-Organizing Software-Platform, Kyungpook National University, 80 Daehakro, Bukgu, Daegu 702-701, Korea.
Sensors (Basel). 2018 Nov 10;18(11):3864. doi: 10.3390/s18113864.
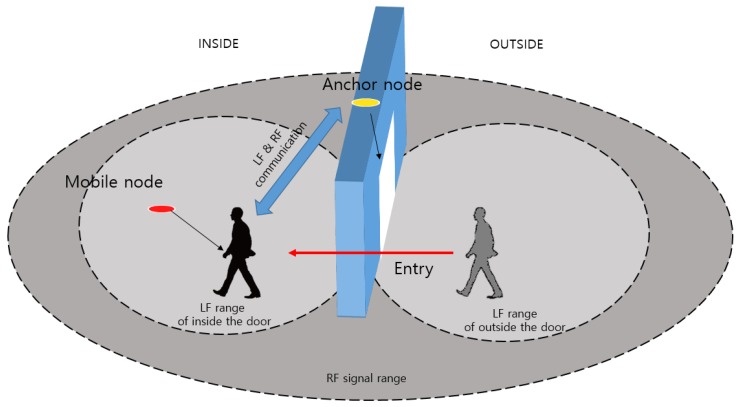
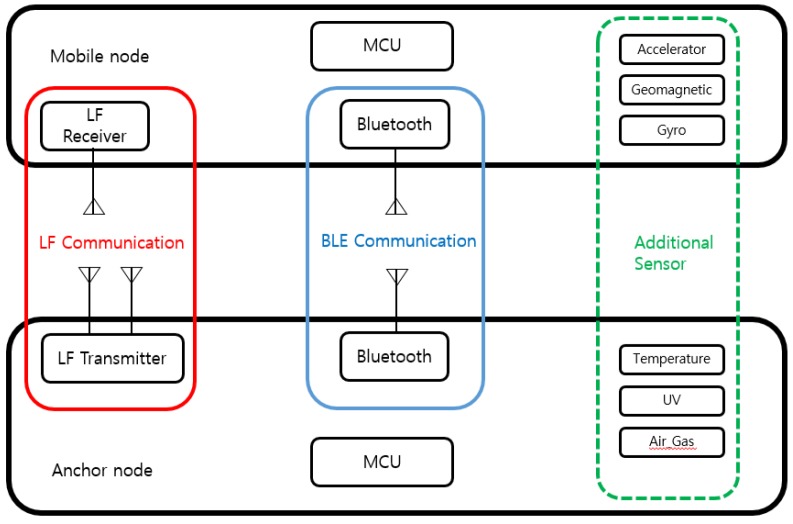
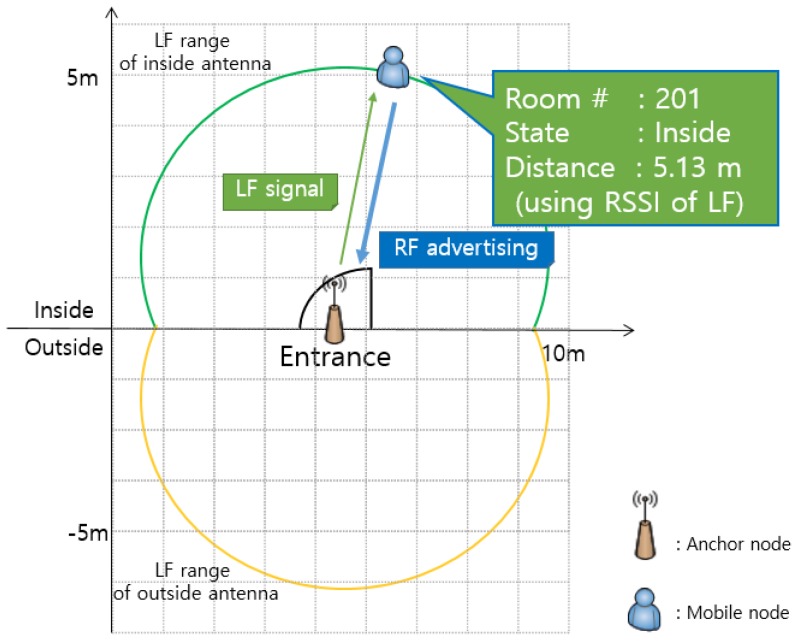
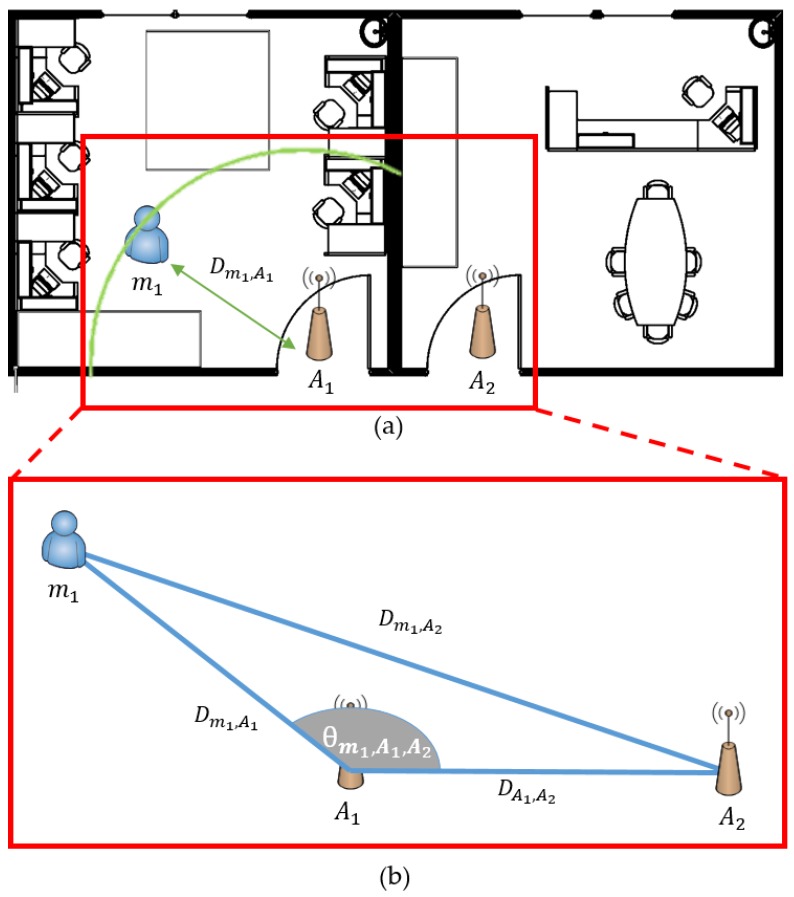
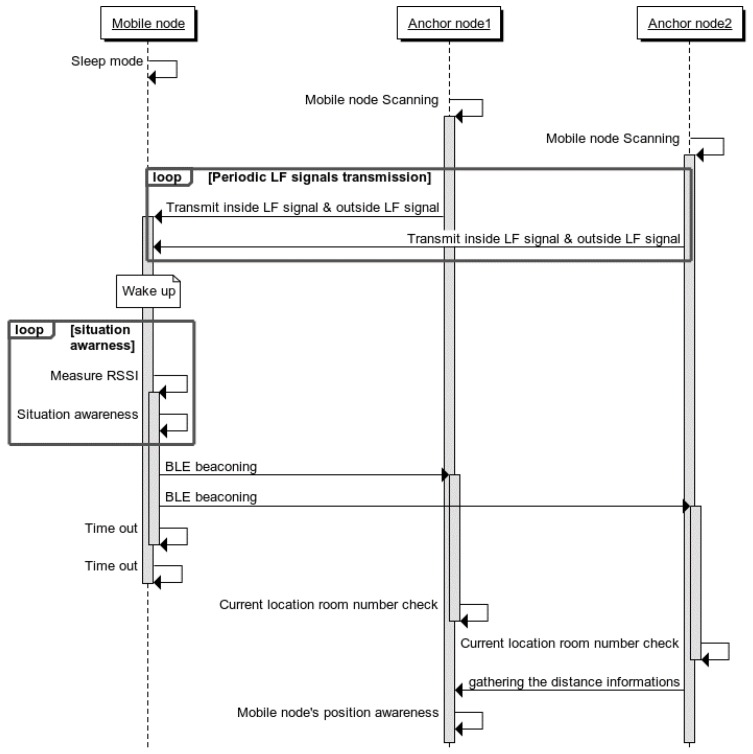
Recently, studies focusing on identifying user's current location for use in a wide variety of differentiated location-based and localization services have steadily increased. In particular, location awareness using wireless communication is gaining attention in indoor environments composed of many obstacles, where GPS signals cannot reach. Previously, studies have focused mostly on location precision, which resulted in using many beacon nodes, not considering the initial installation and maintenance costs, communication robustness, or power consumption. This makes it difficult to apply existing methods to various fields, especially in mobile nodes (i.e., wearable devices, mobile tags, etc.) with limited battery capacity. In this paper, we propose a hybrid situation-aware indoor localization (SAIL) system for real-time indoor localization using a combination of low frequency (LF) and Bluetooth Low Energy (BLE) 4.0. This approach allows us to work with limited battery capacity mobile devices, and identify tagged mobile nodes and their current location in relevance to the anchor node. In our experiment, we attached one anchor node at the entrance to indoor areas such as office or factory settings. Using our hybrid SAIL system, we were able to detect the passing of a mobile node through the entrance and recognize whether the node is entering or exiting the room by calculating the direction of movement as well as the distance from the entrance. This allowed us to distinguish the precise position in an indoor environment with the margin of error being 0.5 m. The signal attenuation due to obstacles is overcome by using LF communication in the 125-kHz band. This approach enables us to reduce the number of initially installed anchor nodes as well as the power consumption of the mobile node. We propose an indoor position recognition system, namely, the hybrid SAIL system, that can be applied to mobile nodes with limited battery capacity by reducing the system complexity and power consumption.
最近,针对在各种差异化基于位置的和定位服务中识别用户当前位置的研究稳步增加。特别是,在由许多障碍物构成的室内环境中,使用无线通信的位置感知功能受到了关注,因为在这些环境中 GPS 信号无法到达。之前的研究主要集中在位置精度上,这导致使用了许多信标节点,而没有考虑初始安装和维护成本、通信鲁棒性或功耗。这使得很难将现有方法应用于各个领域,特别是在具有有限电池容量的移动节点(例如可穿戴设备、移动标签等)中。在本文中,我们提出了一种混合情境感知室内定位(SAIL)系统,该系统使用低频(LF)和蓝牙低能(BLE)4.0 的组合来实现实时室内定位。这种方法允许我们与具有有限电池容量的移动设备一起工作,并识别标记的移动节点及其与锚节点的当前位置。在我们的实验中,我们在办公室或工厂等室内区域的入口处放置一个锚节点。使用我们的混合 SAIL 系统,我们能够检测到移动节点通过入口,并通过计算移动方向和与入口的距离来识别节点是进入还是离开房间。这使我们能够在室内环境中以 0.5m 的误差幅度来区分精确位置。通过在 125kHz 频段使用 LF 通信,可以克服由于障碍物引起的信号衰减。这种方法使我们能够减少初始安装的锚节点数量以及移动节点的功耗。我们提出了一种室内位置识别系统,即混合 SAIL 系统,该系统通过降低系统复杂性和功耗,可应用于具有有限电池容量的移动节点。