Shum Henry
Department of Applied Mathematics, University of Waterloo, Waterloo, ON N2L 3G1, Canada.
Micromachines (Basel). 2019 Jan 18;10(1):65. doi: 10.3390/mi10010065.
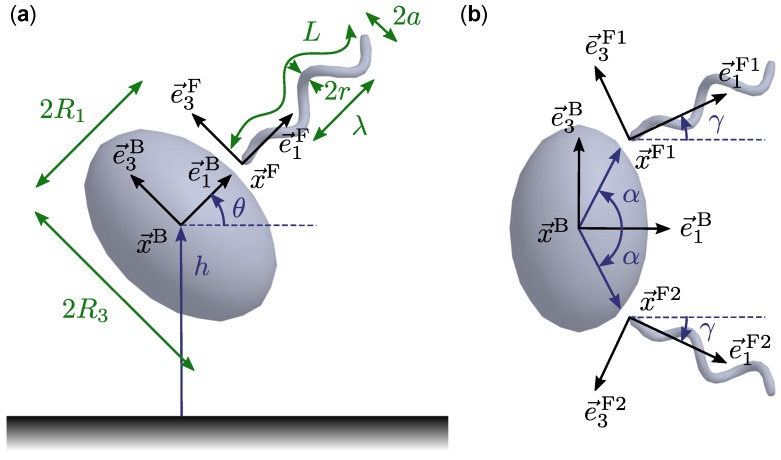
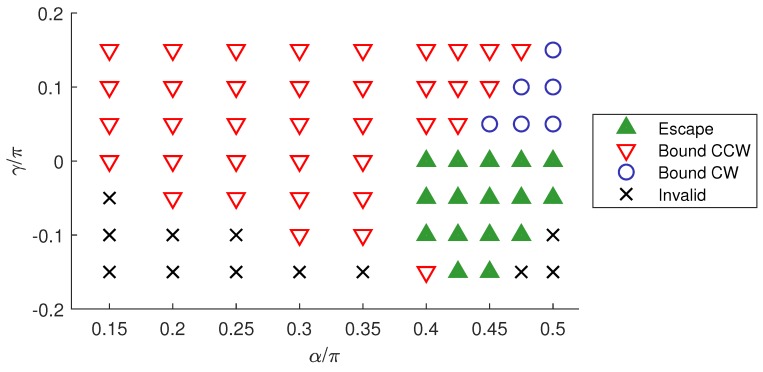
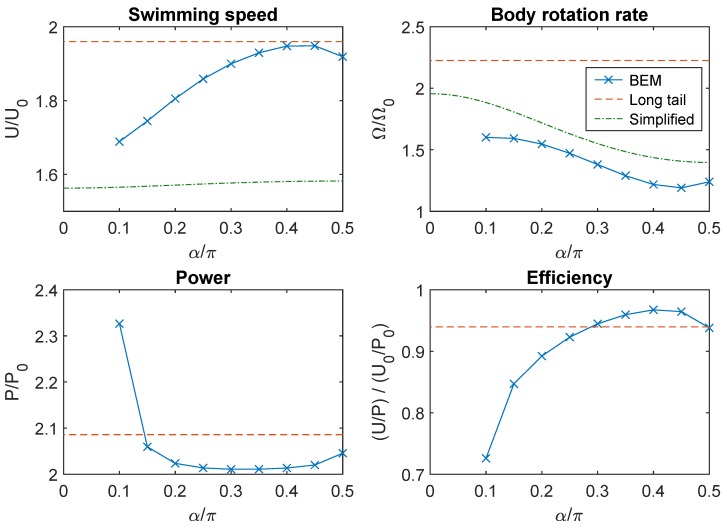
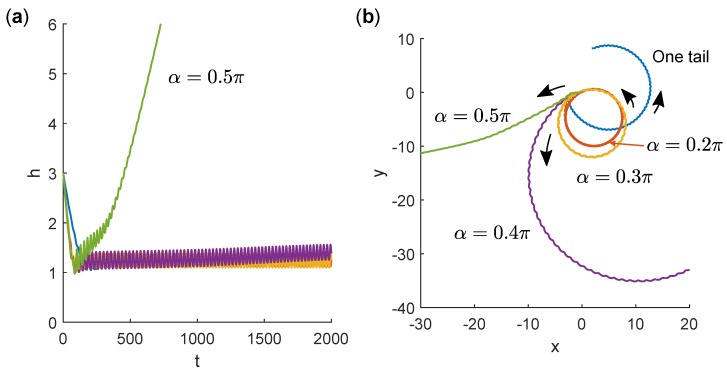
Many theoretical studies of bacterial locomotion adopt a simple model for the organism consisting of a spheroidal cell body and a single corkscrew-shaped flagellum that rotates to propel the body forward. Motivated by experimental observations of a group of magnetotactic bacterial strains, we extended the model by considering two flagella attached to the cell body and rotating about their respective axes. Using numerical simulations, we analyzed the motion of such a microswimmer in bulk fluid and close to a solid surface. We show that positioning the two flagella far apart on the cell body reduces the rate of rotation of the body and increases the swimming speed. Near surfaces, we found that swimmers with two flagella can swim in relatively straight trajectories or circular orbits in either direction. It is also possible for the swimmer to escape from surfaces, unlike a model swimmer of similar shape but with only a single flagellum. Thus, we conclude that there are important implications of swimming with two flagella or flagellar bundles rather than one. These considerations are relevant not only for understanding differences in bacterial morphology but also for designing microrobotic swimmers.
许多关于细菌运动的理论研究采用了一种简单的生物体模型,该模型由一个球形细胞体和一根单螺旋形鞭毛组成,鞭毛旋转以推动细胞体向前运动。受一组趋磁细菌菌株实验观察结果的启发,我们通过考虑附着在细胞体上并绕各自轴旋转的两根鞭毛来扩展该模型。利用数值模拟,我们分析了这种微型游动器在体流体中以及靠近固体表面时的运动。我们表明,将两根鞭毛在细胞体上放置得相距很远会降低细胞体的旋转速率并提高游动速度。在表面附近,我们发现有两根鞭毛的游动器可以沿相对直线的轨迹或沿任一方向的圆形轨道游动。与形状相似但只有一根鞭毛的模型游动器不同,有两根鞭毛的游动器也有可能从表面逃脱。因此,我们得出结论,用两根鞭毛或鞭毛束而不是一根鞭毛游动具有重要意义。这些考虑不仅与理解细菌形态的差异有关,而且与设计微型机器人游动器有关。