Peng Ye, Zhang Wei, Zhang Gongzi, Wang Xiang, Zhang Shuwei, Ma Xin, Tang Peifu, Zhang Lihai
Department of Orthopaedic Surgery, General Hospital of Chinese People's Liberation Army, 28 Fu-Xing Road, Beijing, 100853, People's Republic of China.
Department of Urology Surgery, General Hospital of Chinese People's Liberation Army, 28 Fu-Xing Road, Beijing, 100853, People's Republic of China.
J Orthop Surg Res. 2019 Jan 25;14(1):29. doi: 10.1186/s13018-018-1040-6.
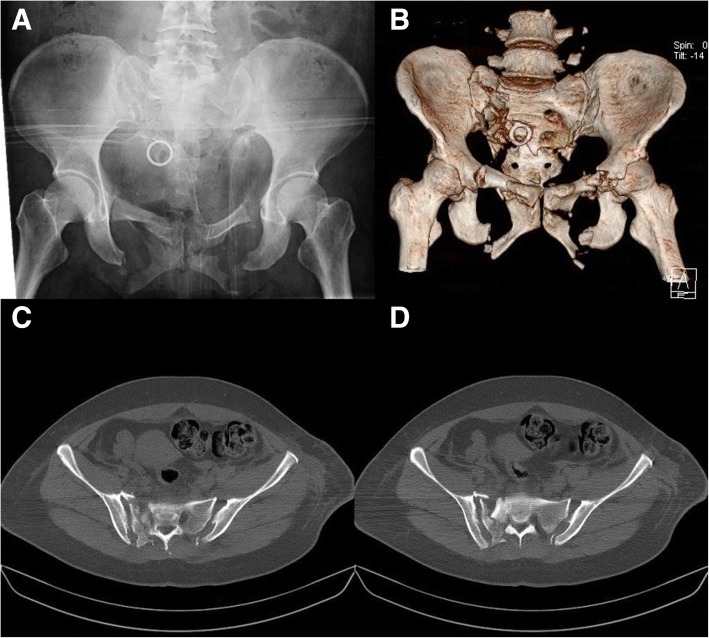
Sacral fracture and sacral nerve injury remain problems in orthopedics, especially in a sacral fracture combined with an anterior sacral nerve injury. Treating a sacral nerve injury with open reduction neurolysis or more conservative treatment cannot meet the clinical needs. Open reduction sacral nerve neurolysis will increase the number of severe, life-threatening injuries, regardless of whether the anterior or posterior approach is used. In recent years, computer- and robot-assisted orthopedic surgery has emerged as part of many clinical treatments.
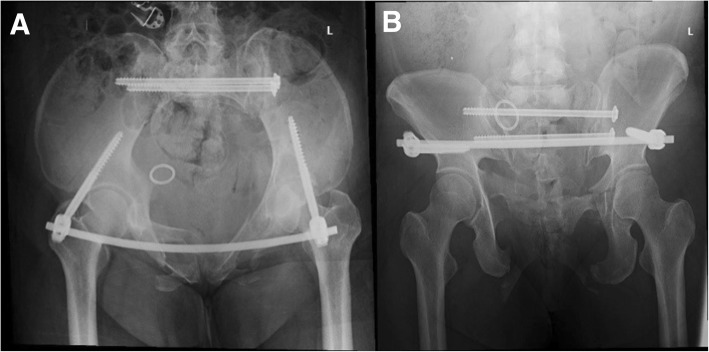
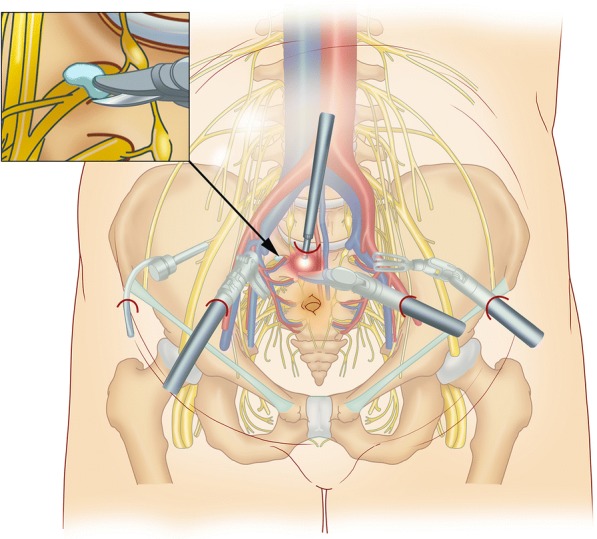
For an unstable pelvic fracture with an anterior sacral nerve injury, we established a comprehensive and integrated solution. To achieve closed reduction, minimally invasive fixation, and minimally invasive anterior sacral nerve neurolysis, the Starr Frame, navigation robot, and Da Vinci robot were jointly applied.
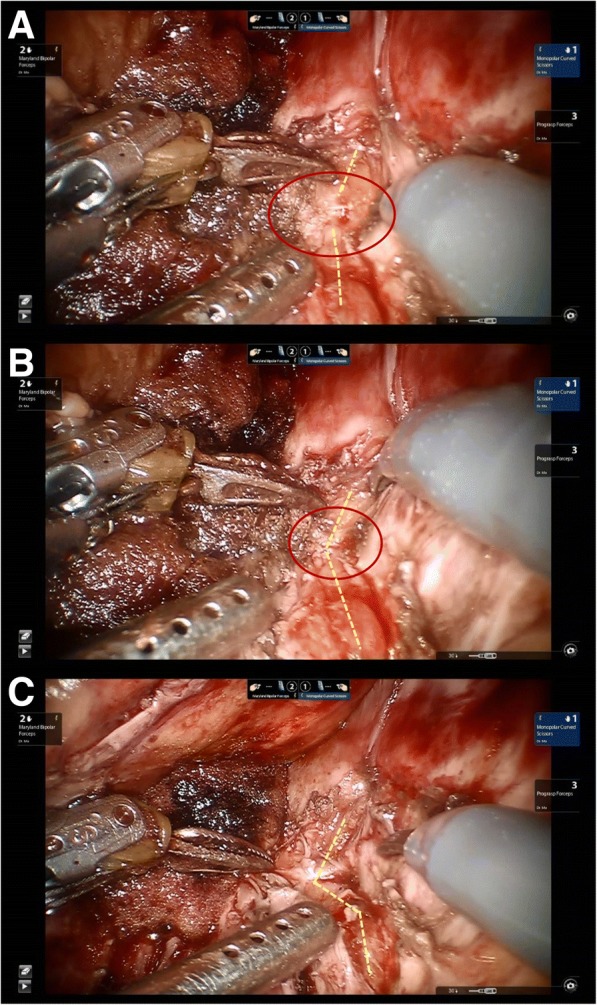
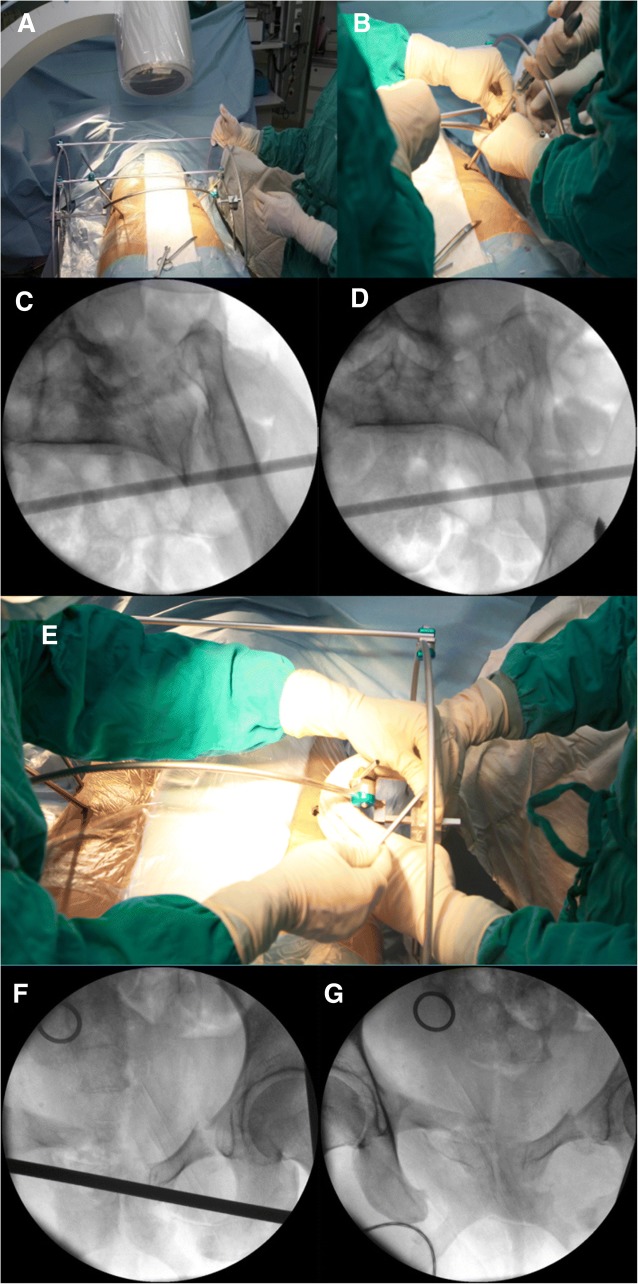
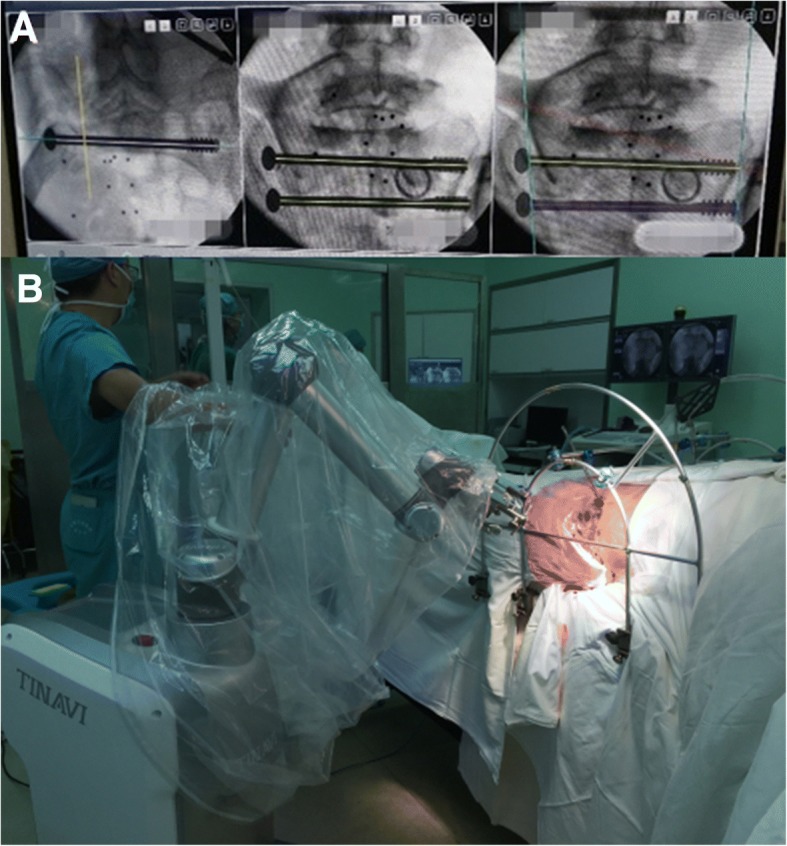
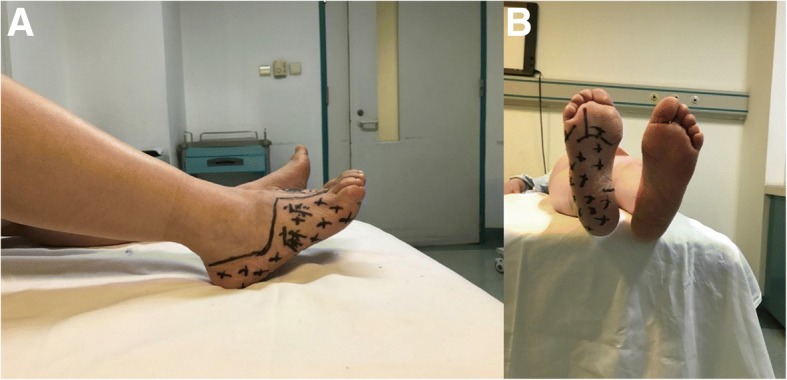
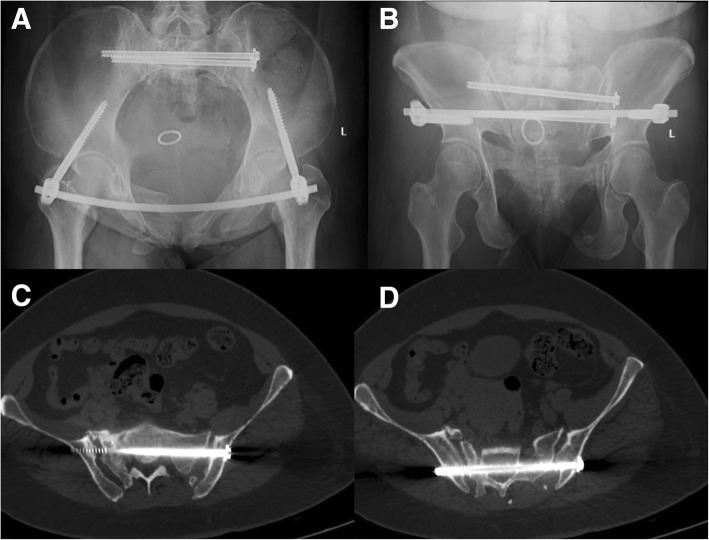
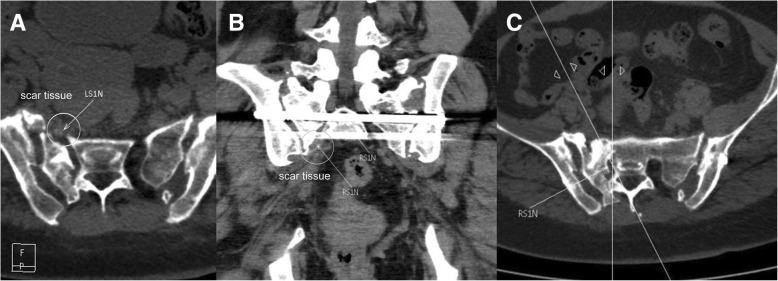
The Starr Frame is very helpful for closed reduction percutaneous fixation in complex pelvic fractures. In this study, a minimally invasive fixation technique for the navigation robot in the pelvic fracture was explored. Although the patient had delayed anterior sacral nerve compression pain after surgery, we developed an approach and surgical method using the Da Vinci robot to explore the sacral nerve by celiac decompression. The patient was relieved of nerve pressure and pain.
This treatment method could be an alternative treatment for pelvic fractures and sacral nerve injury. The application of this treatment is a safe and feasible option that can be employed to manage early and late nerve repair with sacral fractures when open surgery or conservative treatment is unsuitable.
骶骨骨折和骶神经损伤仍是骨科领域的难题,尤其是骶骨骨折合并骶前神经损伤。采用切开复位神经松解术或更保守的治疗方法来治疗骶神经损伤,均无法满足临床需求。无论采用前路还是后路手术,切开复位骶神经松解术都会增加严重的、危及生命的损伤数量。近年来,计算机辅助和机器人辅助骨科手术已成为许多临床治疗的一部分。
对于伴有骶前神经损伤的不稳定骨盆骨折,我们建立了一种综合的治疗方案。为实现闭合复位、微创固定和微创骶前神经松解,联合应用了斯塔尔外固定架、导航机器人和达芬奇机器人。
斯塔尔外固定架对复杂骨盆骨折的闭合复位经皮固定非常有帮助。本研究探索了一种用于骨盆骨折的导航机器人微创固定技术。尽管患者术后出现了延迟性骶前神经压迫性疼痛,但我们开发了一种使用达芬奇机器人通过腹腔减压来探查骶神经的方法和手术方式。患者的神经压迫和疼痛得到缓解。
这种治疗方法可能是骨盆骨折和骶神经损伤的一种替代治疗方法。当开放手术或保守治疗不适用时,这种治疗方法的应用是一种安全可行的选择,可用于处理骶骨骨折的早期和晚期神经修复。