The BioRobotics Institute, Sant'Anna School of Advanced Studies, 56025 Pisa, Italy.
Department of Linguistics and Comparative Cultural Studies, Ca' Foscari University of Venice, 30123 Venice, Italy.
Sensors (Basel). 2019 Feb 3;19(3):641. doi: 10.3390/s19030641.
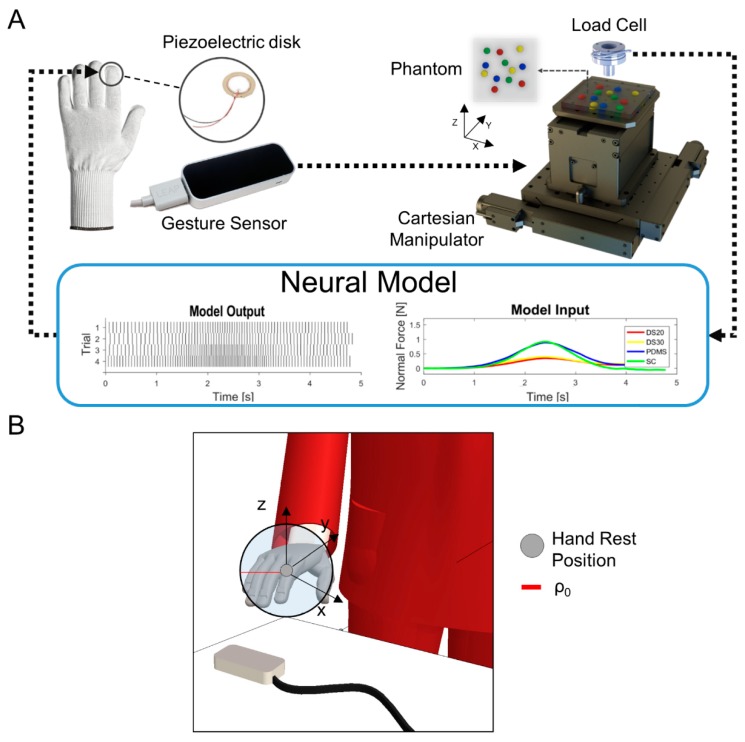
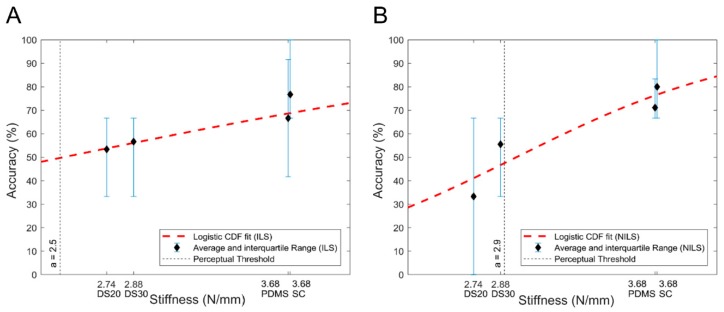
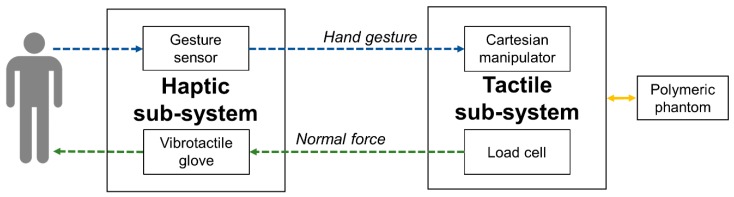
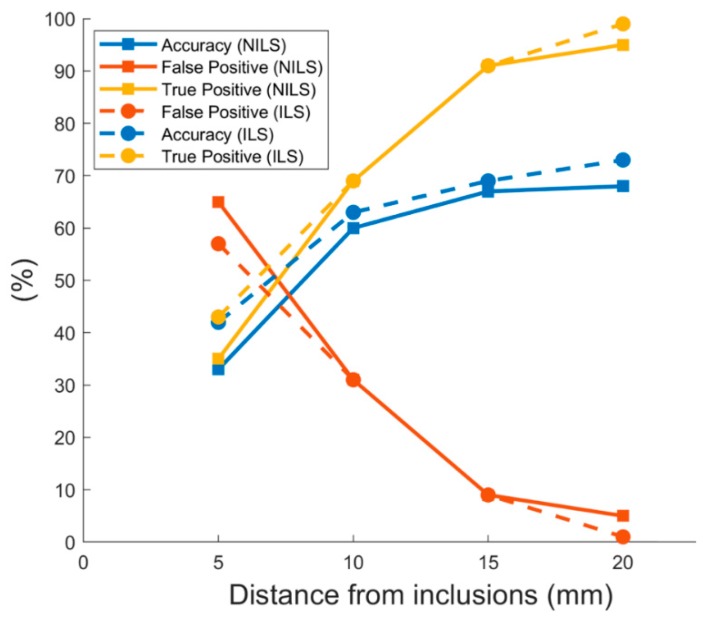
Advancements in the study of the human sense of touch are fueling the field of haptics. This is paving the way for augmenting sensory perception during object palpation in tele-surgery and reproducing the sensed information through tactile feedback. Here, we present a novel tele-palpation apparatus that enables the user to detect nodules with various distinct stiffness buried in an ad-hoc polymeric phantom. The contact force measured by the platform was encoded using a neuromorphic model and reproduced on the index fingertip of a remote user through a haptic glove embedding a piezoelectric disk. We assessed the effectiveness of this feedback in allowing nodule identification under two experimental conditions of real-time telepresence: In Line of Sight (ILS), where the platform was placed in the visible range of a user; and the more demanding Not In Line of Sight (NILS), with the platform and the user being 50 km apart. We found that the entailed percentage of identification was higher for stiffer inclusions with respect to the softer ones (average of 74% within the duration of the task), in both telepresence conditions evaluated. These promising results call for further exploration of tactile augmentation technology for telepresence in medical interventions.
触觉研究的进展正在推动触觉领域的发展。这为远程手术中物体触诊时增强感知觉和通过触觉反馈再现感知信息铺平了道路。在这里,我们提出了一种新的远程触诊设备,使用户能够检测到埋在特定聚合物虚拟模型中的具有不同硬度的结节。平台测量的接触力使用神经形态模型进行编码,并通过嵌入压电盘的力反馈手套在远程用户的食指指尖上再现。我们评估了这种反馈在两种实时远程临场感实验条件下(视线内 ILS 和更具挑战性的非视线内 NILS)识别结节的有效性:平台放置在用户的可见范围内;而平台和用户之间相隔 50 公里。我们发现,对于较硬的结节,识别的百分比相对于较软的结节更高(在任务持续时间内平均为 74%),在两种评估的远程临场感条件下都是如此。这些有希望的结果呼吁进一步探索用于医疗干预远程临场感的触觉增强技术。