Department of Biomedical Engineering, University of Delaware, Newark, DE 19713, United States of America.
Biostatistics Core, College of Health Sciences, University of Delaware, Newark, DE 19713, United States of America.
PLoS One. 2019 Feb 22;14(2):e0200862. doi: 10.1371/journal.pone.0200862. eCollection 2019.
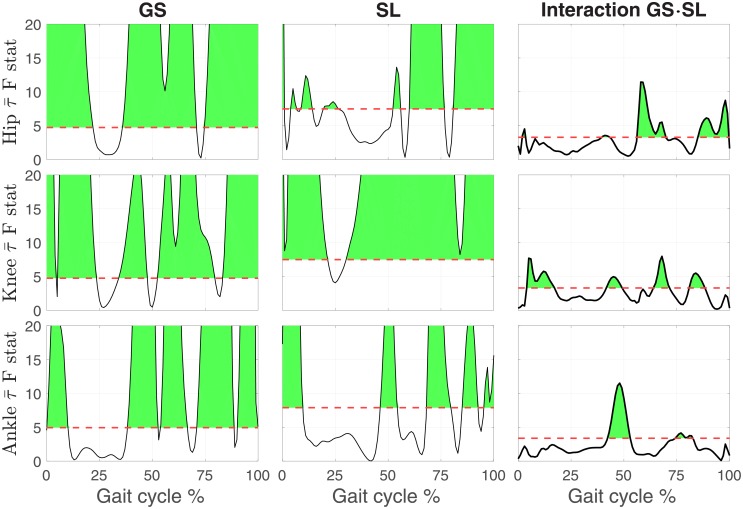
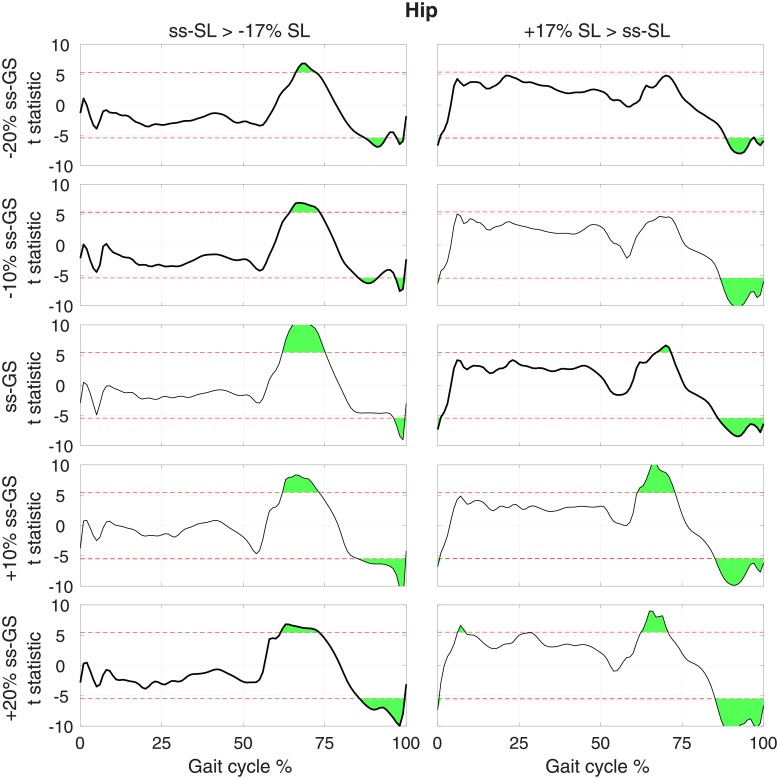
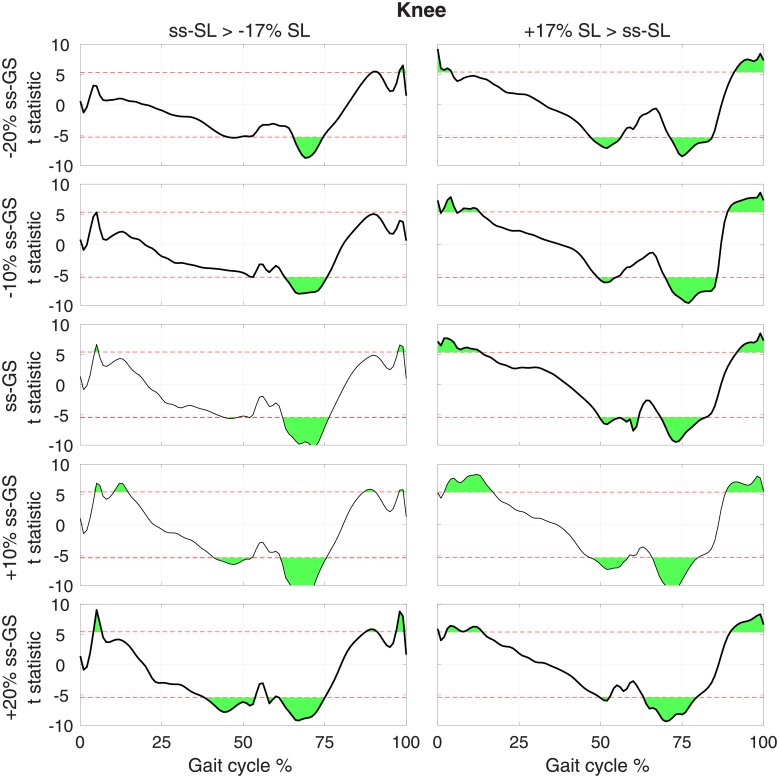
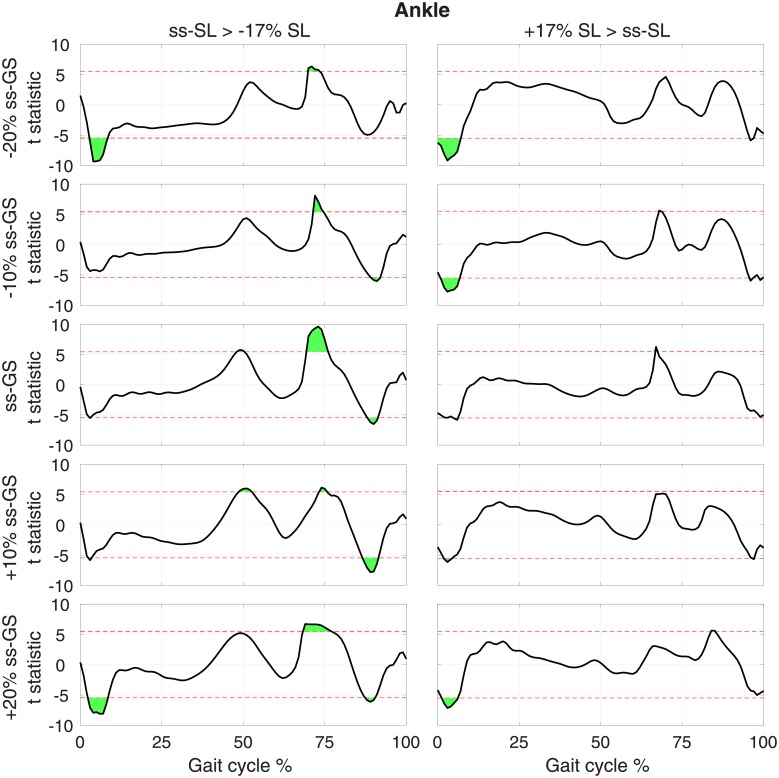
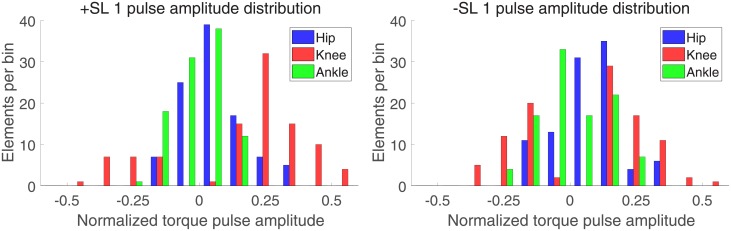
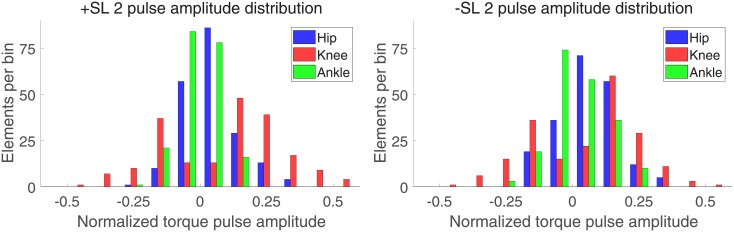
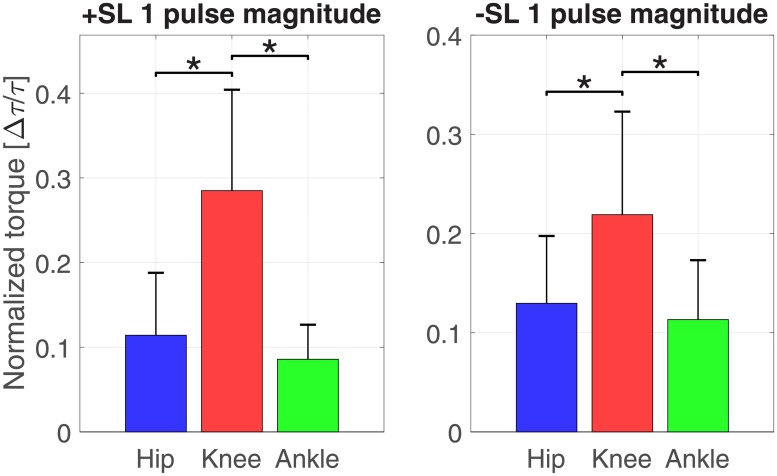
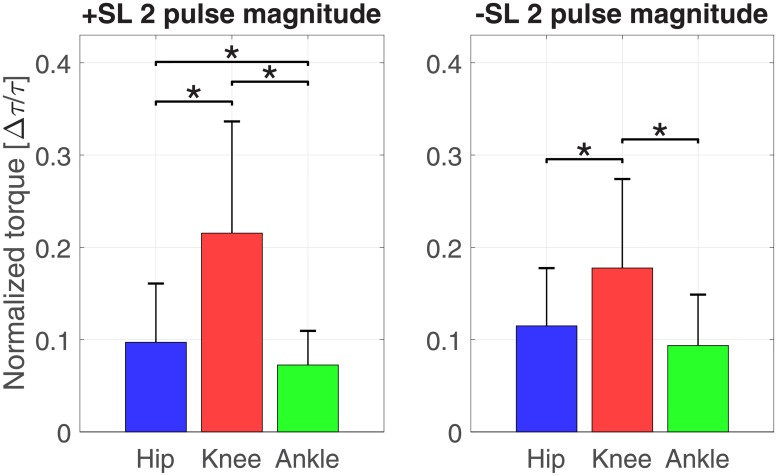
Robot-assisted training is a promising tool under development for improving walking function based on repetitive goal-oriented task practice. The challenges in developing the controllers for gait training devices that promote desired changes in gait is complicated by the limited understanding of the human response to robotic input. A possible method of controller formulation can be based on the principle of bio-inspiration, where a robot is controlled to apply the change in joint moment applied by human subjects when they achieve a gait feature of interest. However, it is currently unclear how lower extremity joint moments are modulated by even basic gait spatio-temporal parameters. In this study, we investigated how sagittal plane joint moments are affected by a factorial modulation of two important gait parameters: gait speed and stride length. We present the findings obtained from 20 healthy control subjects walking at various treadmill-imposed speeds and instructed to modulate stride length utilizing real-time visual feedback. Implementing a continuum analysis of inverse-dynamics derived joint moment profiles, we extracted the effects of gait speed and stride length on joint moment throughout the gait cycle. Moreover, we utilized a torque pulse approximation analysis to determine the timing and amplitude of torque pulses that approximate the difference in joint moment profiles between stride length conditions, at all gait speed conditions. Our results show that gait speed has a significant effect on the moment profiles in all joints considered, while stride length has more localized effects, with the main effect observed on the knee moment during stance, and smaller effects observed for the hip joint moment during swing and ankle moment during the loading response. Moreover, our study demonstrated that trailing limb angle, a parameter of interest in programs targeting propulsion at push-off, was significantly correlated with stride length. As such, our study has generated assistance strategies based on pulses of torque suitable for implementation via a wearable exoskeleton with the objective of modulating stride length, and other correlated variables such as trailing limb angle.
机器人辅助训练是一种有前途的工具,它基于重复的目标导向任务练习来改善步行功能。开发用于促进步态变化的步态训练设备控制器的挑战很复杂,因为对人体对机器人输入的反应的理解有限。控制器的一种可能的制定方法可以基于生物启发原理,即控制机器人施加人类受试者在实现感兴趣的步态特征时施加的关节力矩变化。然而,目前尚不清楚下肢关节力矩是如何被甚至基本的步态时空参数调制的。在这项研究中,我们研究了在步态速度和步长这两个重要的步态参数的因子调制下,矢状面关节力矩是如何受到影响的。我们介绍了在各种跑步机强制速度下行走的 20 名健康对照受试者的研究结果,并指示他们利用实时视觉反馈来调节步长。通过对逆动力学推导的关节力矩曲线进行连续分析,我们提取了步态速度和步长对整个步态周期中关节力矩的影响。此外,我们利用扭矩脉冲近似分析来确定在所有步态速度条件下,近似不同步长条件下关节力矩曲线之间差异的扭矩脉冲的时间和幅度。我们的结果表明,步态速度对所有考虑的关节力矩曲线都有显著影响,而步长的影响更具有局部性,主要影响发生在站立阶段的膝关节力矩上,而在摆动阶段的髋关节力矩和在负荷反应阶段的踝关节力矩上的影响较小。此外,我们的研究表明,在以推动为目标的程序中,感兴趣的参数是尾随肢体角度,它与步长显著相关。因此,我们的研究生成了基于扭矩脉冲的辅助策略,适合通过带有目标调节步长和其他相关变量(如尾随肢体角度)的可穿戴式外骨骼来实现。