North Carolina State University, 911 Oval Drive, Raleigh, NC, 27606, USA.
School of Biomedical Sciences, University of Queensland, St. Lucia, QLD, Australia.
J Neuroeng Rehabil. 2019 May 15;16(1):57. doi: 10.1186/s12984-019-0523-y.
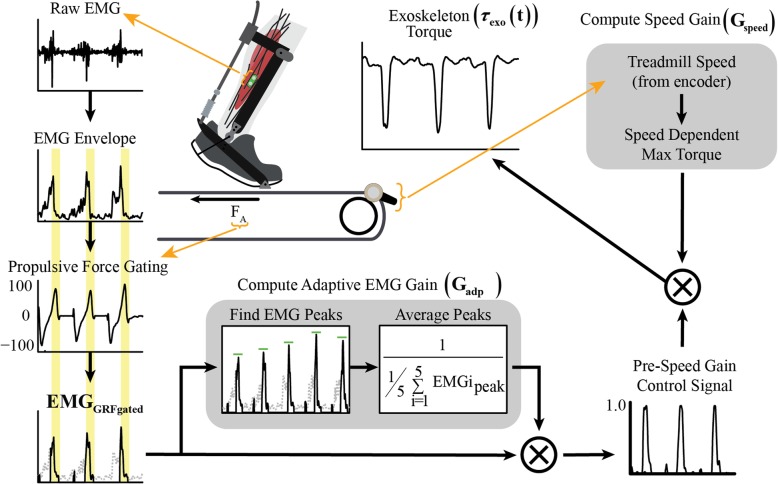
Ankle exoskeletons offer a promising opportunity to offset mechanical deficits after stroke by applying the needed torque at the paretic ankle. Because joint torque is related to gait speed, it is important to consider the user's gait speed when determining the magnitude of assistive joint torque. We developed and tested a novel exoskeleton controller for delivering propulsive assistance which modulates exoskeleton torque magnitude based on both soleus muscle activity and walking speed. The purpose of this research is to assess the impact of the resulting exoskeleton assistance on post-stroke walking performance across a range of walking speeds.
Six participants with stroke walked with and without assistance applied to a powered ankle exoskeleton on the paretic limb. Walking speed started at 60% of their comfortable overground speed and was increased each minute (n00, n01, n02, etc.). We measured lower limb joint and limb powers, metabolic cost of transport, paretic and non-paretic limb propulsion, and trailing limb angle.
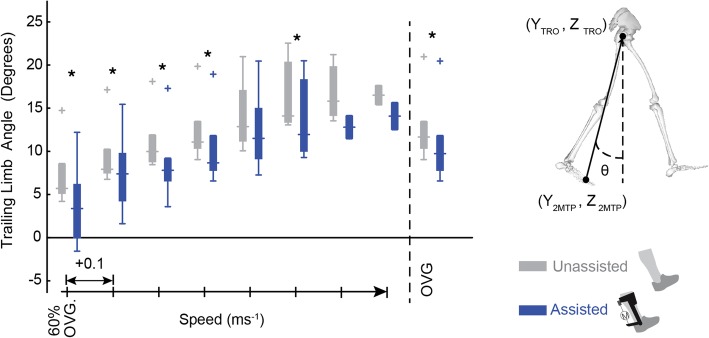
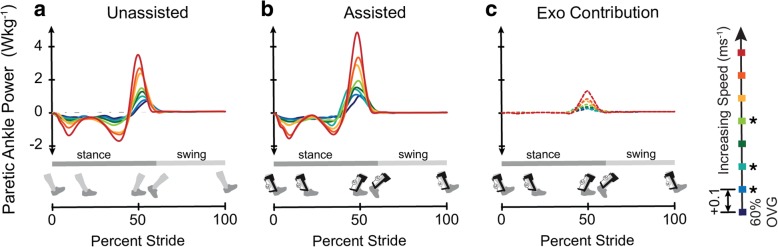
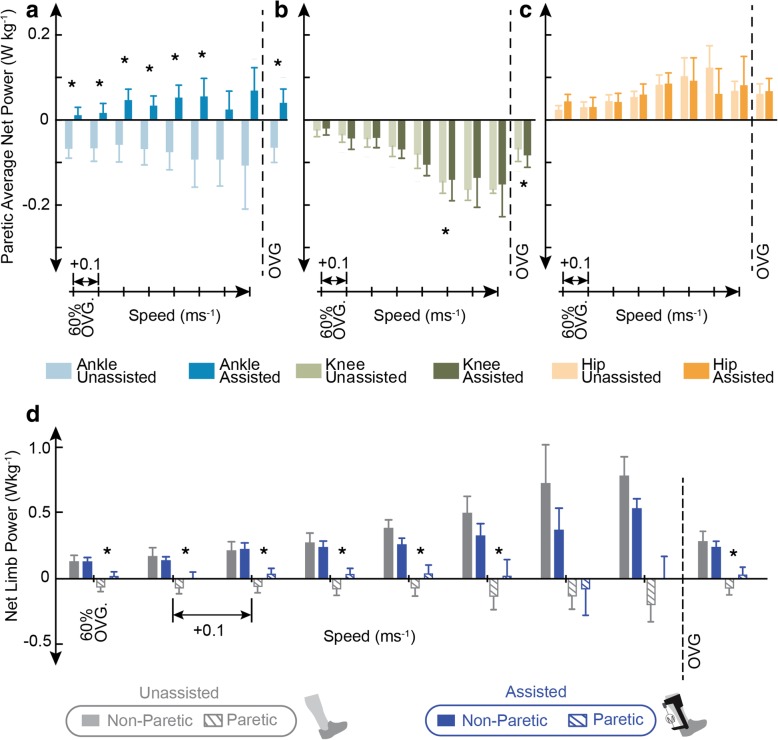
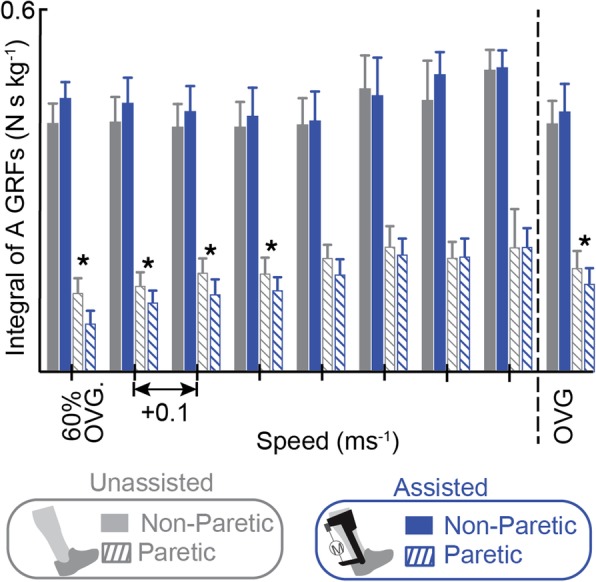
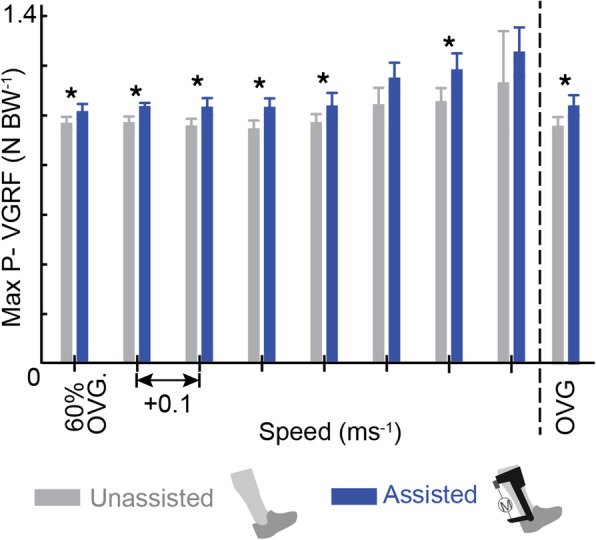
Exoskeleton assistance increased with walking speed, verifying the speed-adaptive nature of the controller. Both paretic ankle joint power and total limb power increased significantly with exoskeleton assistance at six walking speeds (n00, n01, n02, n03, n04, n05). Despite these joint- and limb-level benefits associated with exoskeleton assistance, no subject averaged metabolic benefits were evident when compared to the unassisted condition. Both paretic trailing limb angle and integrated anterior paretic ground reaction forces were reduced with assistance applied as compared to no assistance at four speeds (n00, n01, n02, n03).
Our results suggest that despite appropriate scaling of ankle assistance by the exoskeleton controller, suboptimal limb posture limited the conversion of exoskeleton assistance into forward propulsion. Future studies could include biofeedback or verbal cues to guide users into limb configurations that encourage the conversion of mechanical power at the ankle to forward propulsion.
N/A.
踝关节外骨骼通过在患侧踝关节施加所需的扭矩,为中风后弥补机械缺陷提供了一个很有前景的机会。由于关节扭矩与步态速度有关,因此在确定辅助关节扭矩的大小时,考虑用户的步态速度非常重要。我们开发并测试了一种新的外骨骼控制器,用于提供推进辅助,该控制器根据比目鱼肌活动和行走速度来调节外骨骼扭矩的大小。本研究的目的是评估在一系列行走速度下,由此产生的外骨骼辅助对中风后行走表现的影响。
6 名患有中风的参与者在患侧肢体上使用动力踝关节外骨骼进行行走,同时使用和不使用辅助。行走速度从他们舒适的地面速度的 60%开始,每分钟增加一次(n00、n01、n02 等)。我们测量了下肢关节和肢体的功率、运输代谢成本、患侧和非患侧肢体的推进以及拖曳肢体角度。
外骨骼辅助随行走速度而增加,验证了控制器的速度自适应特性。在六种行走速度(n00、n01、n02、n03、n04、n05)下,外骨骼辅助显著增加了患侧踝关节关节功率和总肢体功率。尽管外骨骼辅助带来了这些关节和肢体水平的益处,但与未辅助的情况相比,没有一个受试者的代谢益处明显。与无辅助相比,在四种速度(n00、n01、n02、n03)下,辅助应用时患侧拖曳肢体角度和整合的患侧地面反作用力前向分量都减小了。
我们的研究结果表明,尽管外骨骼控制器通过适当的方式对踝关节辅助进行了缩放,但次优的肢体姿势限制了将外骨骼辅助转化为向前推进。未来的研究可以包括生物反馈或口头提示,以指导用户采用鼓励将踝关节的机械功率转化为向前推进的肢体配置。
无。