The Solomon H. Snyder Department of Neuroscience, Kavli Neuroscience Discovery Institute, Brain Science Institute, The Johns Hopkins University School of Medicine, Baltimore, United States.
Elife. 2019 Feb 28;8:e41535. doi: 10.7554/eLife.41535.
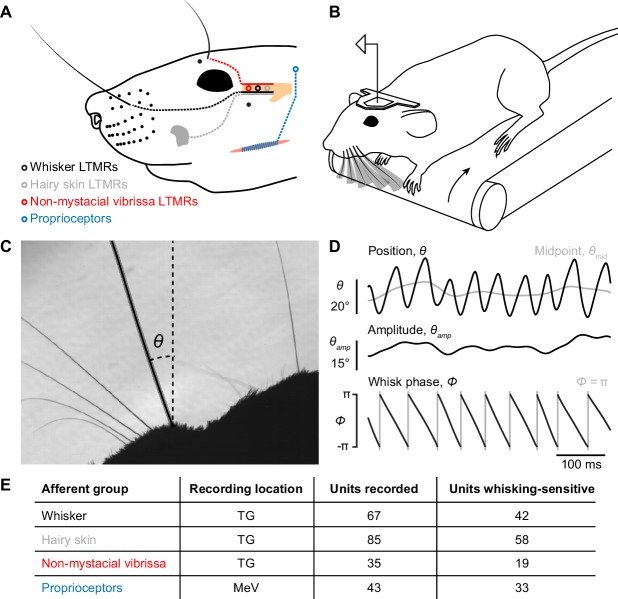
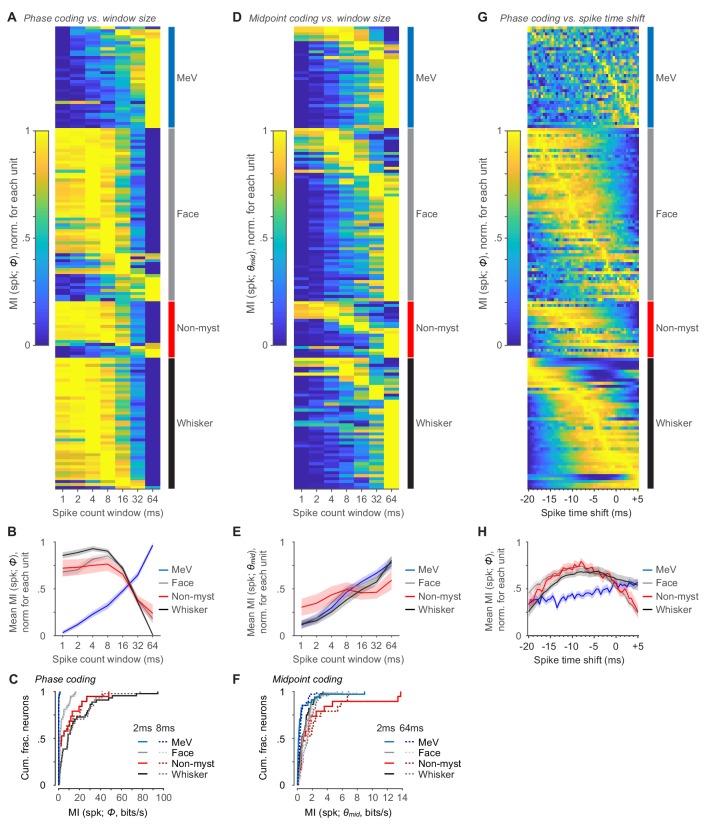
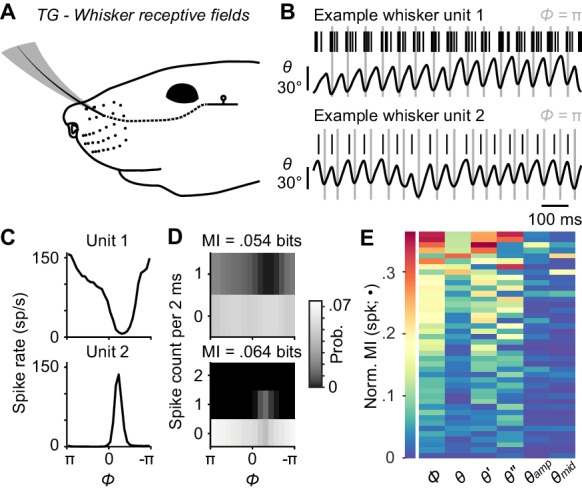
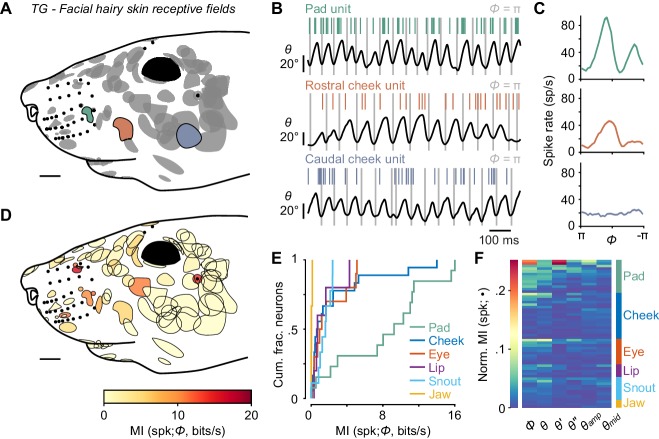
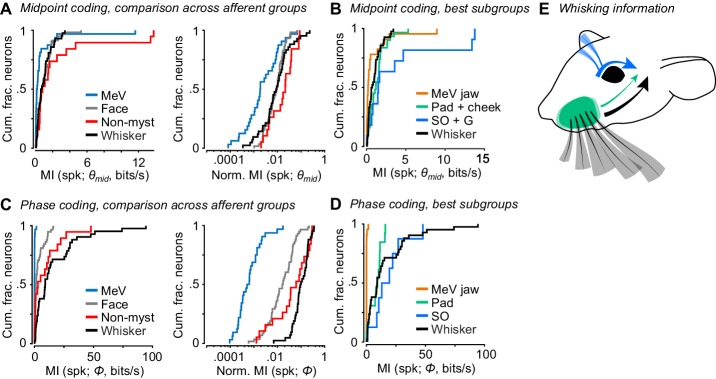
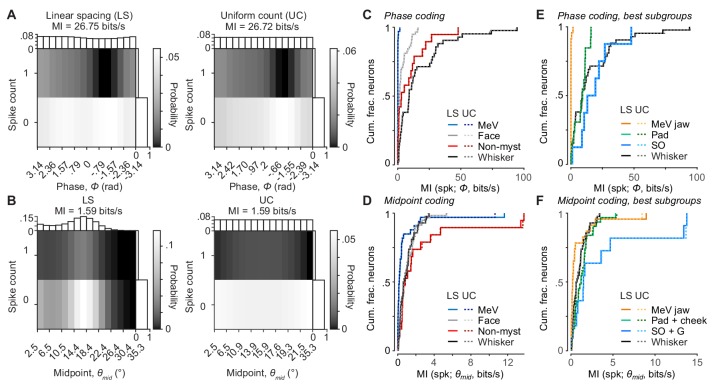
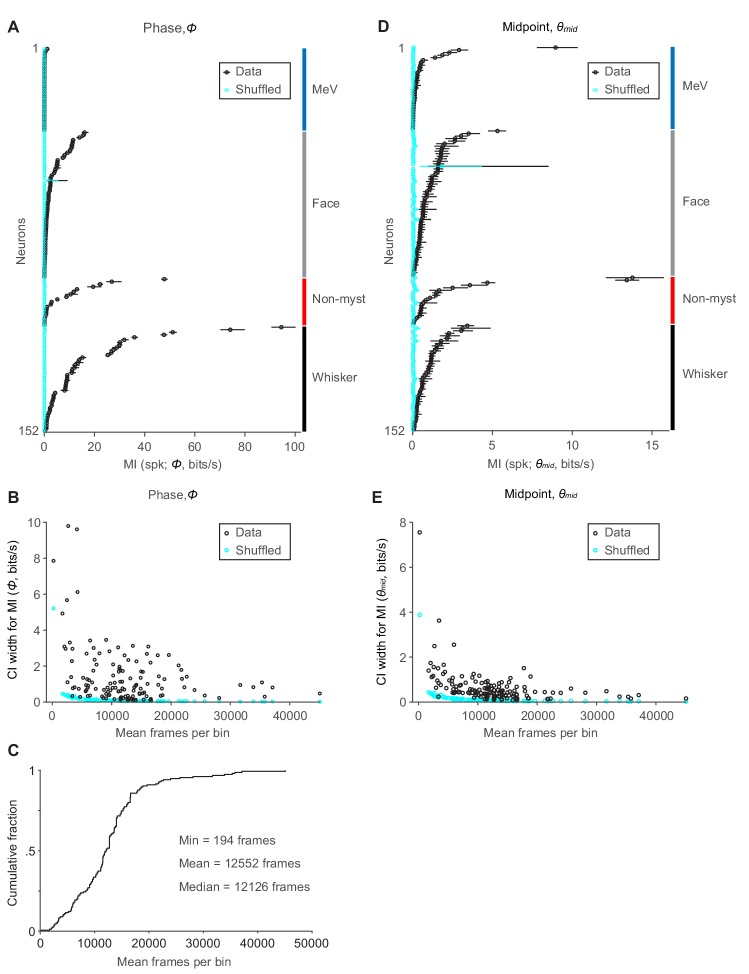
Haptic perception synthesizes touch with proprioception, the sense of body position. Humans and mice alike experience rich active touch of the face. Because most facial muscles lack proprioceptor endings, the sensory basis of facial proprioception remains unsolved. Facial proprioception may instead rely on mechanoreceptors that encode both touch and self-motion. In rodents, whisker mechanoreceptors provide a signal that informs the brain about whisker position. Whisking involves coordinated orofacial movements, so mechanoreceptors innervating facial regions other than whiskers could also provide information about whisking. To define all sources of sensory information about whisking available to the brain, we recorded spikes from mechanoreceptors innervating diverse parts of the face. Whisker motion was encoded best by whisker mechanoreceptors, but also by those innervating whisker pad hairy skin and supraorbital vibrissae. Redundant self-motion responses may provide the brain with a stable proprioceptive signal despite mechanical perturbations during active touch.
触觉感知将触摸与本体感觉(身体位置感)结合在一起。人和老鼠都能体验到丰富的面部主动触摸。由于大多数面部肌肉缺乏本体感受器末梢,面部本体感觉的感觉基础仍未解决。面部本体感觉可能依赖于既能编码触觉又能编码自身运动的机械感受器。在啮齿动物中,胡须机械感受器提供了一个关于胡须位置的信号,告知大脑。胡须运动涉及协调的口面部运动,因此支配除胡须以外的面部区域的机械感受器也可以提供关于胡须运动的信息。为了定义大脑可获得的关于胡须运动的所有感觉信息来源,我们记录了支配面部不同部位的机械感受器的尖峰。胡须运动最好由胡须机械感受器编码,但也由支配胡须垫毛皮肤和眶上触须的机械感受器编码。冗余的自身运动反应可能会为大脑提供一个稳定的本体感觉信号,尽管在主动触摸过程中会有机械扰动。