Department of Precision Engineering, School of Engineering, The University of Tokyo, Tokyo, Japan.
Research into Artifacts, Center for Engineering (RACE), The University of Tokyo, Kashiwa, Japan.
PLoS One. 2019 Mar 6;14(3):e0212613. doi: 10.1371/journal.pone.0212613. eCollection 2019.
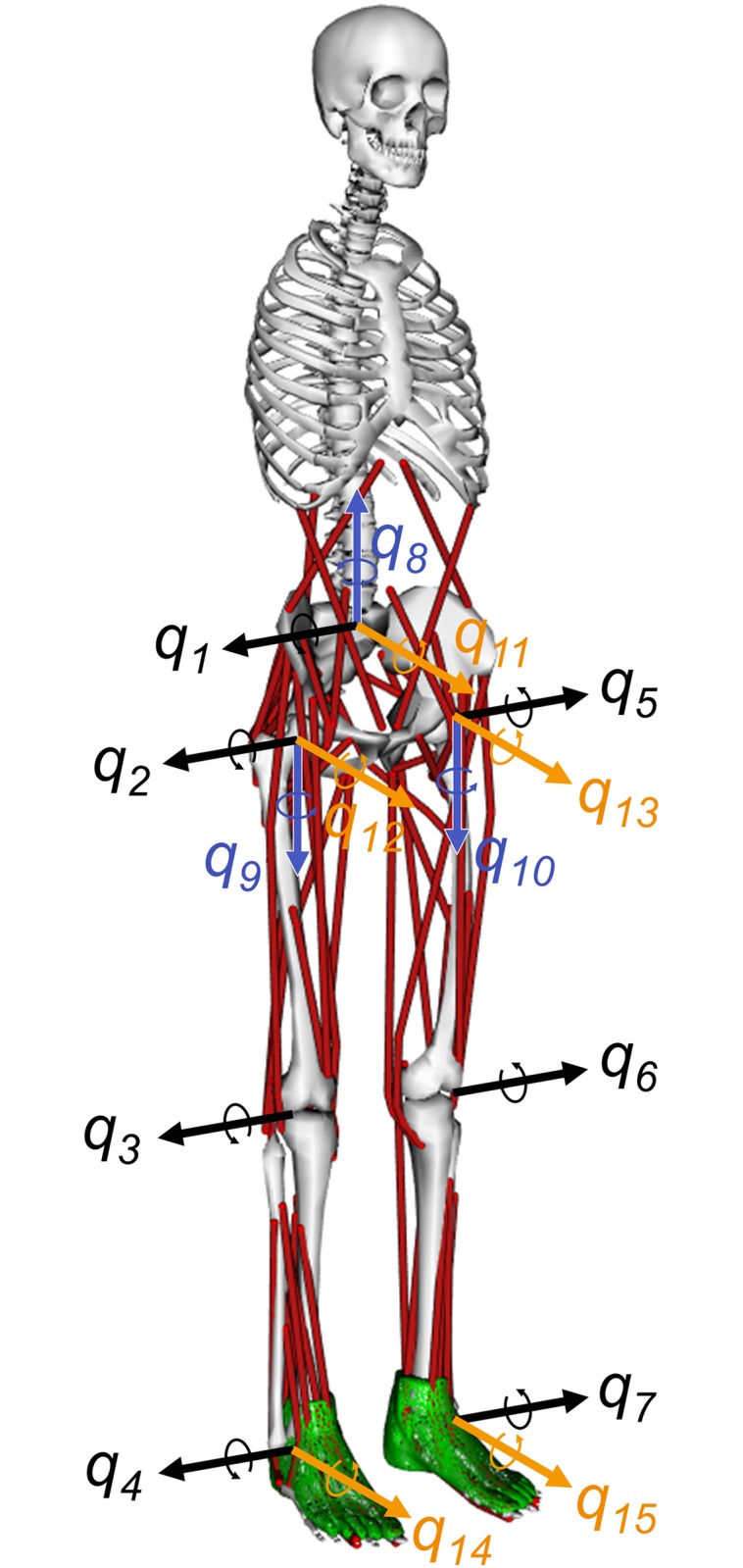
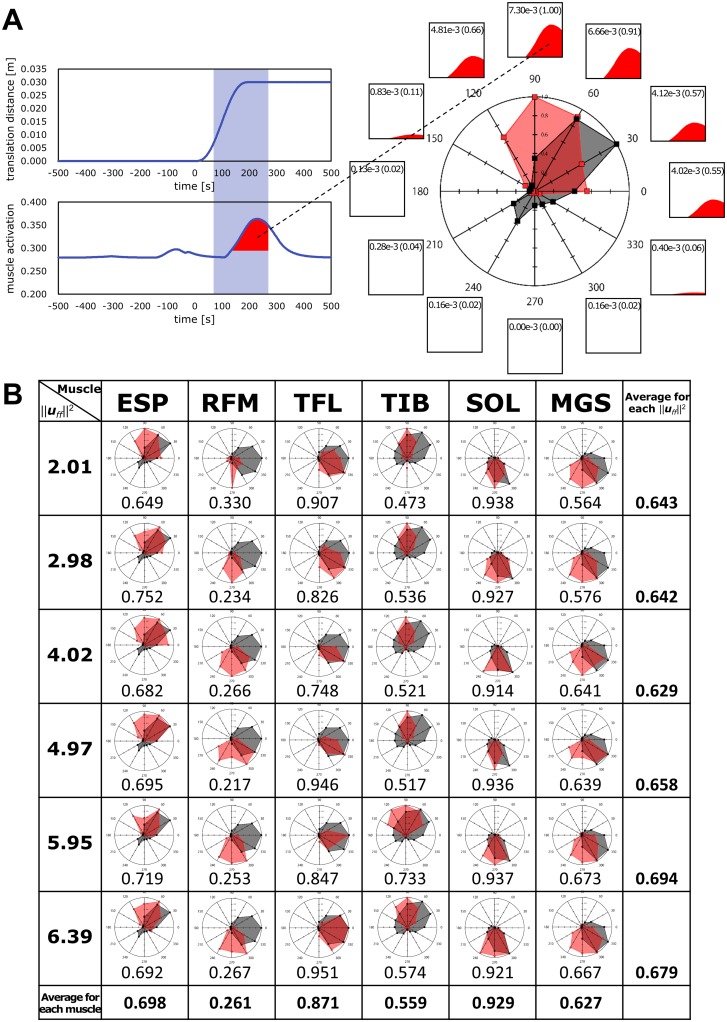
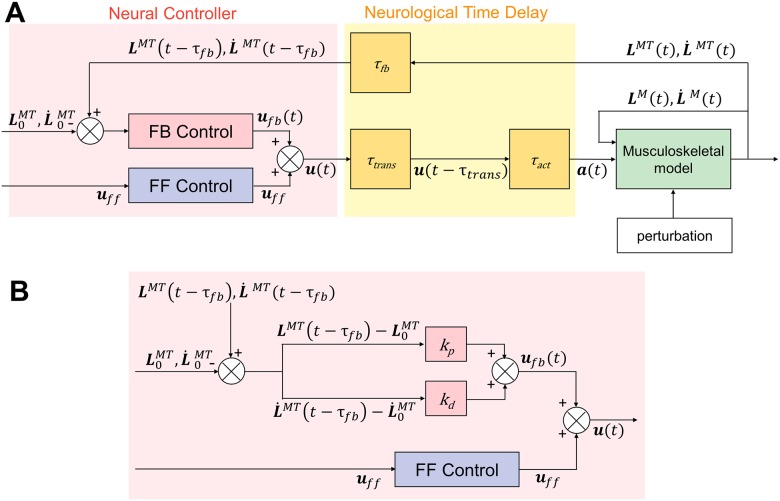
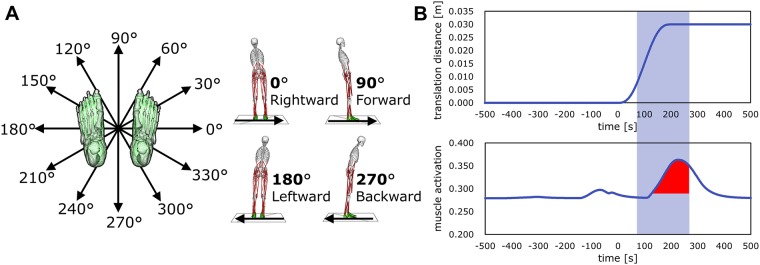
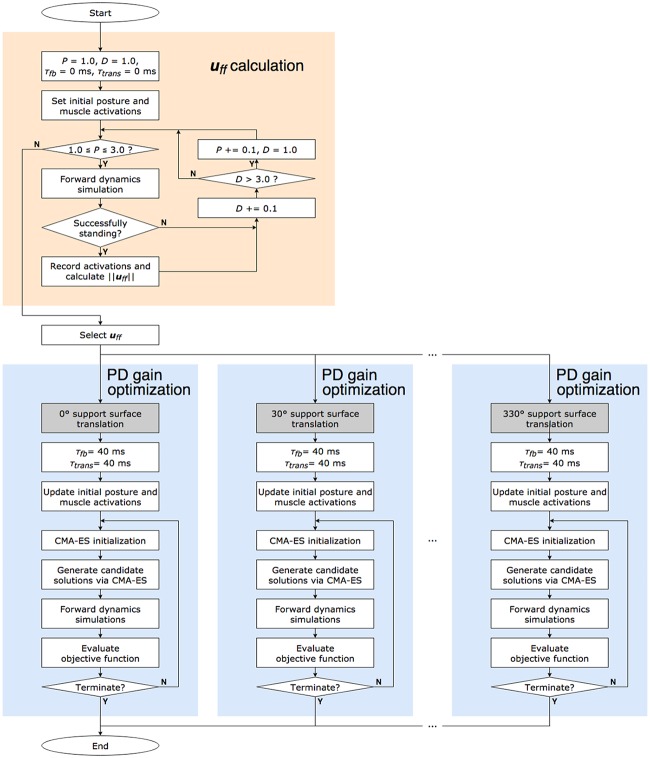
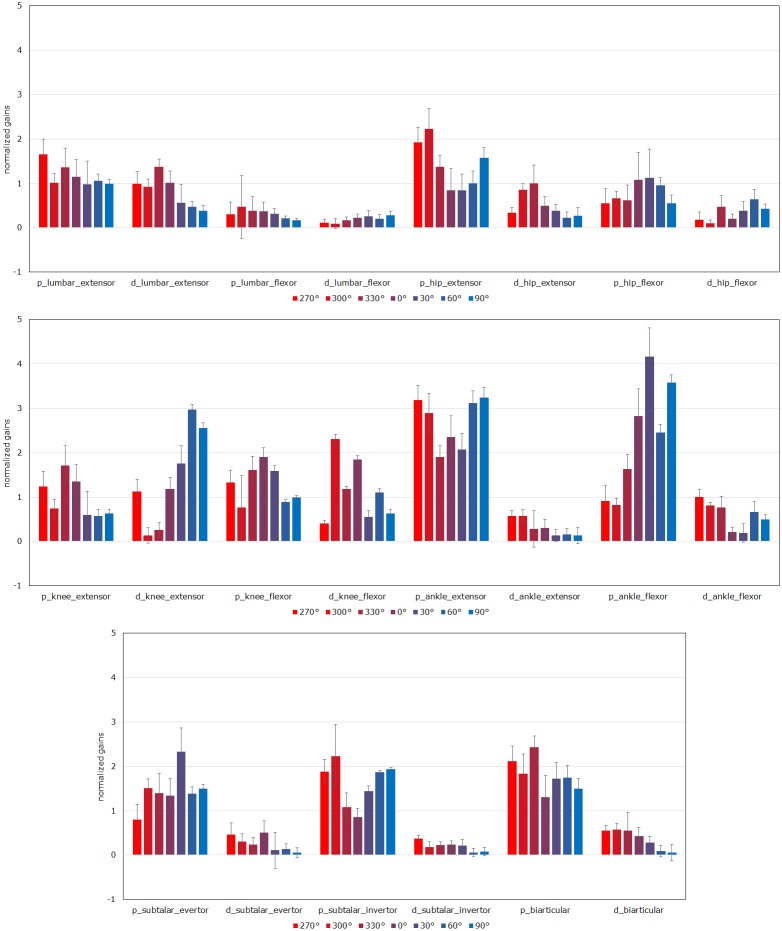
The human body is a complex system driven by hundreds of muscles, and its control mechanisms are not sufficiently understood. To understand the mechanisms of human postural control, neural controller models have been proposed by different research groups, including our feed-forward and feedback control model. However, these models have been evaluated under forward and backward perturbations, at most. Because a human body experiences perturbations from many different directions in daily life, neural controller models should be evaluated in response to multidirectional perturbations, including in the forward/backward, lateral, and diagonal directions. The objective of this study was to investigate the validity of an NC model with FF and FB control under multidirectional perturbations. We developed a musculoskeletal model with 70 muscles and 15 degrees of freedom of joints, positioned it in a standing posture by using the neural controller model, and translated its support surface in multiple directions as perturbations. We successfully determined the parameters of the neural controller model required to maintain the stance of the musculoskeletal model for each perturbation direction. The trends in muscle response magnitudes and the magnitude of passive ankle stiffness were consistent with the results of experimental studies. We conclude that the neural controller model can adapt to multidirectional perturbations by generating suitable muscle activations. We anticipate that the neural controller model could be applied to the study of the control mechanisms of patients with torso tilt and diagnosis of the change in control mechanisms from patients' behaviors.
人体是一个由数百块肌肉驱动的复杂系统,其控制机制尚未被充分理解。为了理解人体姿势控制的机制,不同的研究小组提出了神经控制器模型,包括我们的前馈和反馈控制模型。然而,这些模型最多只在正向和反向扰动下进行了评估。由于人体在日常生活中会受到来自许多不同方向的扰动,因此神经控制器模型应该在响应多向扰动时进行评估,包括正向/反向、侧向和对角方向。本研究的目的是探讨具有前馈和反馈控制的 NC 模型在多向扰动下的有效性。我们开发了一个具有 70 块肌肉和 15 个关节自由度的肌肉骨骼模型,使用神经控制器模型将其定位在站立姿势,并将其支撑表面在多个方向上平移作为扰动。我们成功确定了神经控制器模型在每个扰动方向下维持肌肉骨骼模型站立所需的参数。肌肉反应幅度和被动踝关节刚度幅度的趋势与实验研究的结果一致。我们得出结论,神经控制器模型可以通过产生合适的肌肉激活来适应多向扰动。我们预计神经控制器模型可以应用于研究躯干倾斜患者的控制机制,并从患者的行为中诊断控制机制的变化。