Shanbhag Julian, Fleischmann Sophie, Wechsler Iris, Gassner Heiko, Winkler Jürgen, Eskofier Bjoern M, Koelewijn Anne D, Wartzack Sandro, Miehling Jörg
Engineering Design, Department of Mechanical Engineering, Friedrich-Alexander-Universität Erlangen-Nürnberg, Erlangen, Germany.
Machine Learning and Data Analytics Lab, Department Artificial Intelligence in Biomedical Engineering (AIBE), Friedrich-Alexander-Universität Erlangen-Nürnberg, Erlangen, Germany.
Front Neurosci. 2024 May 15;18:1393749. doi: 10.3389/fnins.2024.1393749. eCollection 2024.
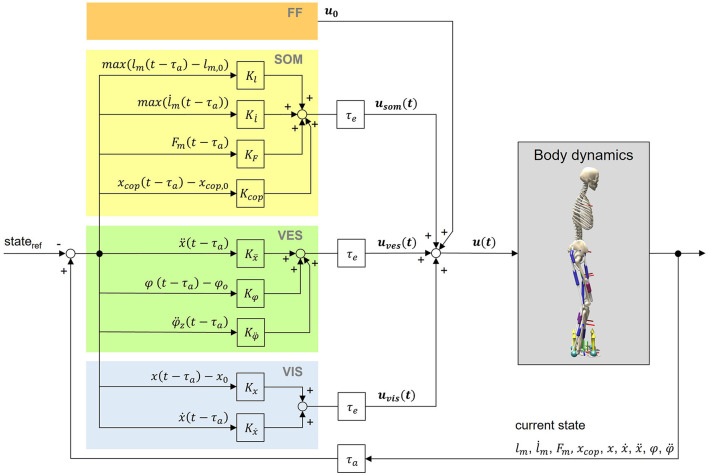
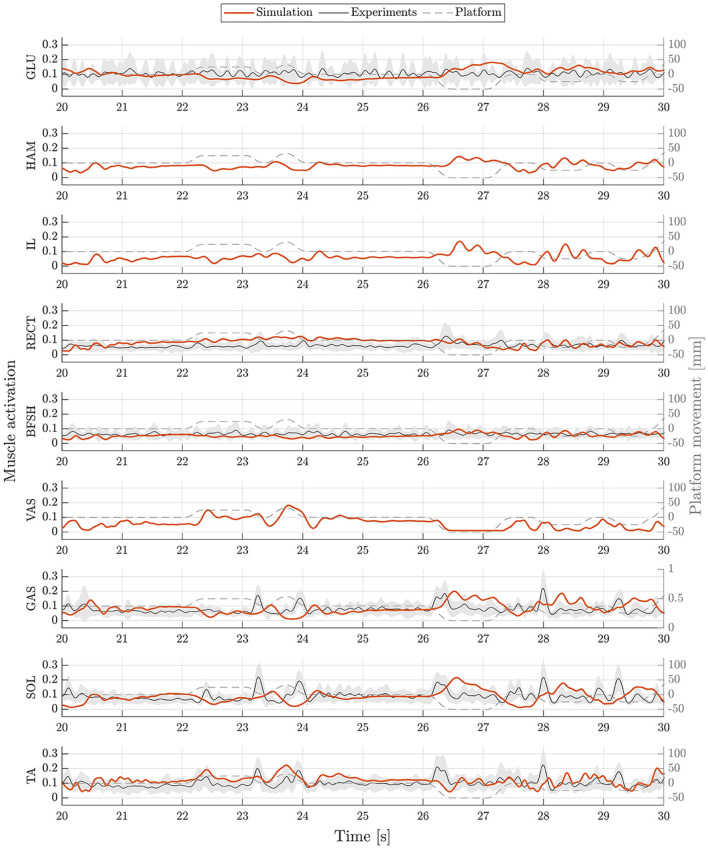
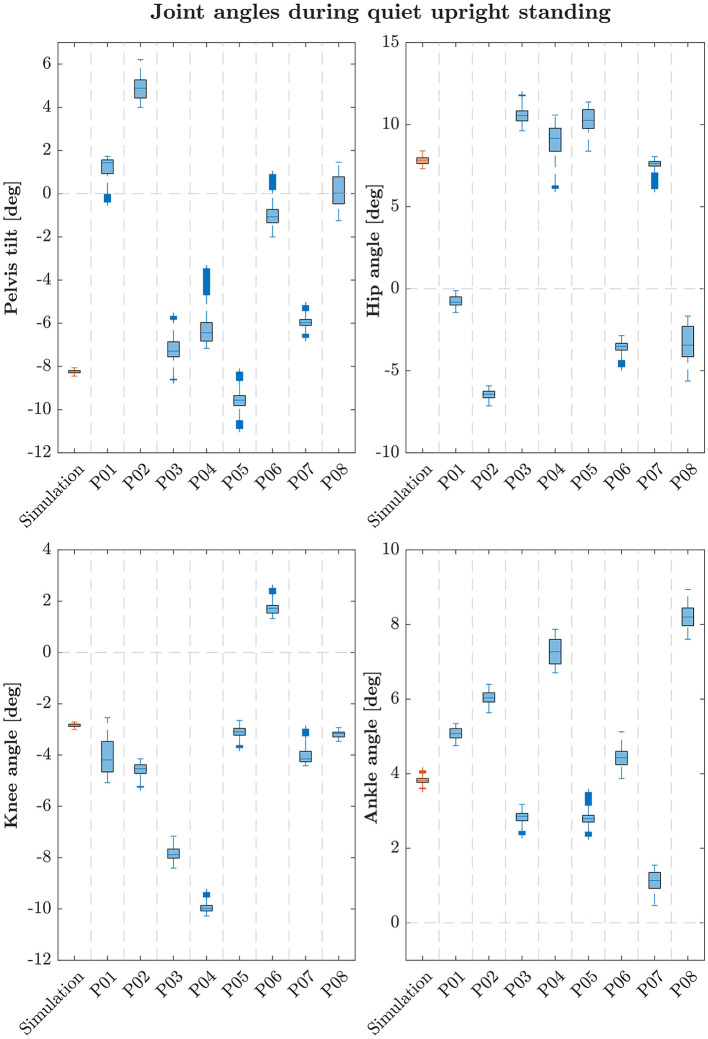
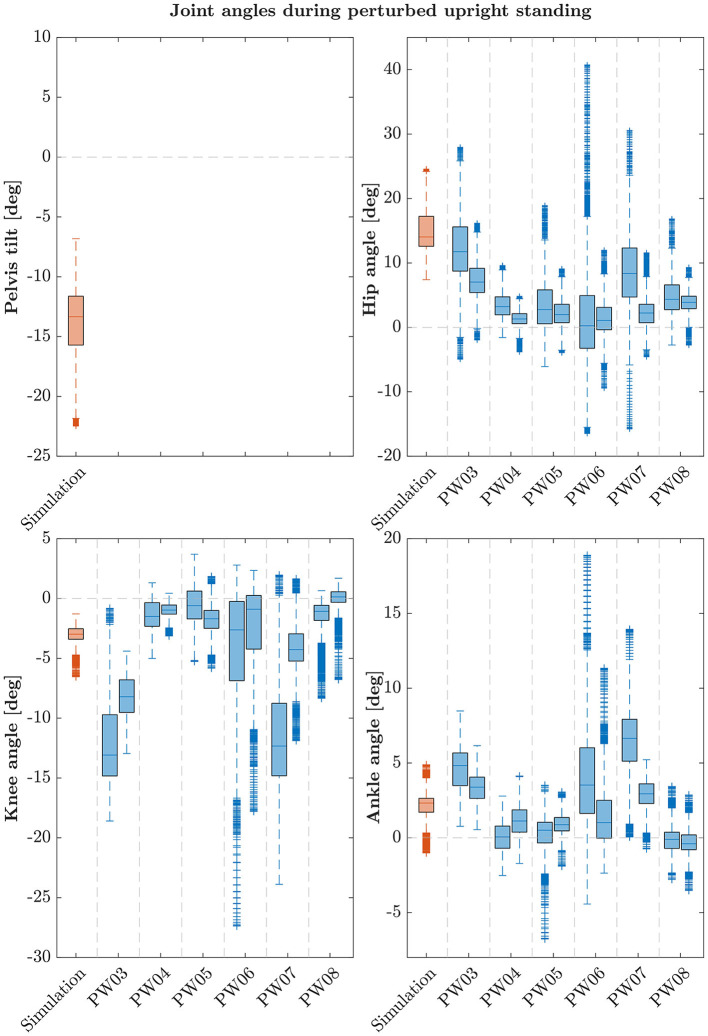
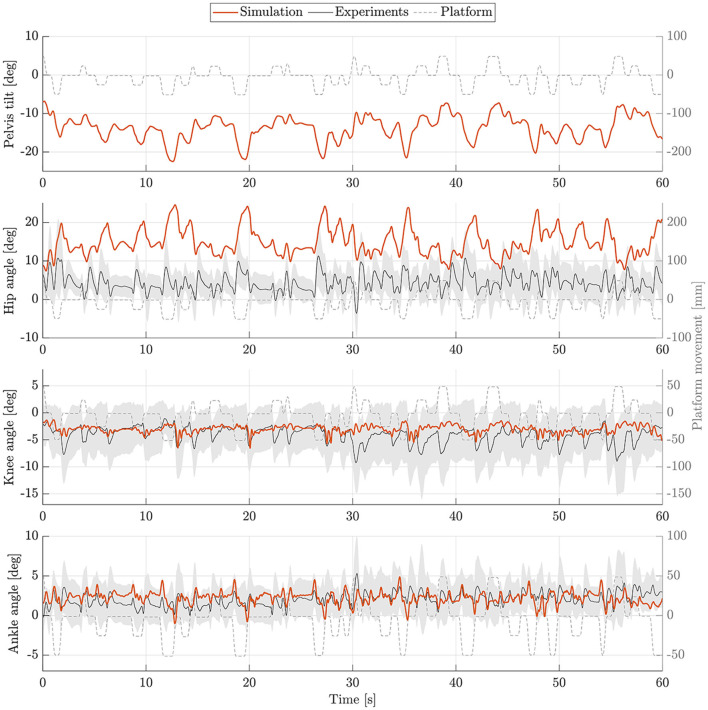
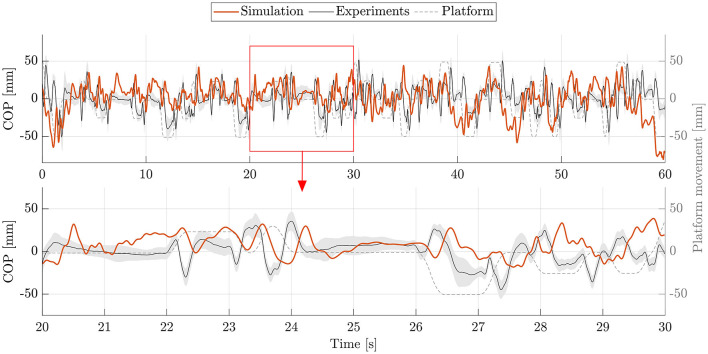
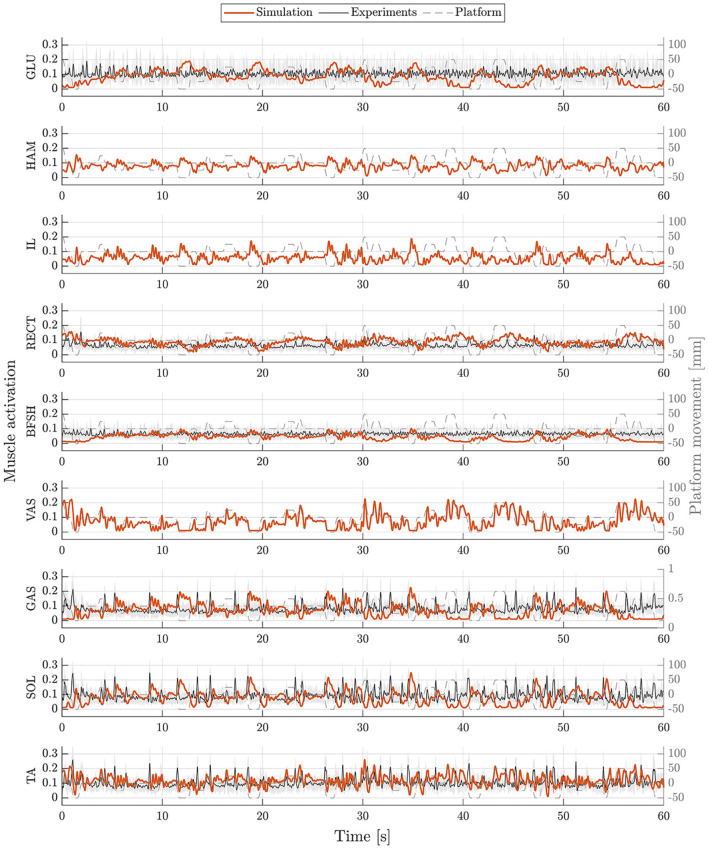
The human's upright standing is a complex control process that is not yet fully understood. Postural control models can provide insights into the body's internal control processes of balance behavior. Using physiologically plausible models can also help explaining pathophysiological motion behavior. In this paper, we introduce a neuromusculoskeletal postural control model using sensor feedback consisting of somatosensory, vestibular and visual information. The sagittal plane model was restricted to effectively six degrees of freedom and consisted of nine muscles per leg. Physiologically plausible neural delays were considered for balance control. We applied forward dynamic simulations and a single shooting approach to generate healthy reactive balance behavior during quiet and perturbed upright standing. Control parameters were optimized to minimize muscle effort. We showed that our model is capable of fulfilling the applied tasks successfully. We observed joint angles and ranges of motion in physiologically plausible ranges and comparable to experimental data. This model represents the starting point for subsequent simulations of pathophysiological postural control behavior.
人类的直立站立是一个复杂的控制过程,目前尚未完全被理解。姿势控制模型可以深入了解身体平衡行为的内部控制过程。使用生理上合理的模型也有助于解释病理生理运动行为。在本文中,我们介绍了一种使用由体感、前庭和视觉信息组成的传感器反馈的神经肌肉骨骼姿势控制模型。矢状面模型有效地限制为六个自由度,每条腿由九块肌肉组成。在平衡控制中考虑了生理上合理的神经延迟。我们应用正向动态模拟和单步射击方法来生成安静和受干扰直立站立期间的健康反应性平衡行为。优化控制参数以最小化肌肉用力。我们表明我们的模型能够成功完成所应用的任务。我们观察到关节角度和运动范围在生理上合理的范围内,并且与实验数据相当。该模型代表了后续病理生理姿势控制行为模拟的起点。