Duan Xingguang, Xie Dongsheng, Zhang Runtian, Li Xiaotian, Sun Jiali, Qian Chao, Song Xinya, Li Changsheng
School of Medical Technology, Beijing Institute of Technology, Beijing 100081, China.
School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China.
Cyborg Bionic Syst. 2023;4:0013. doi: 10.34133/cbsystems.0013. Epub 2023 Mar 15.
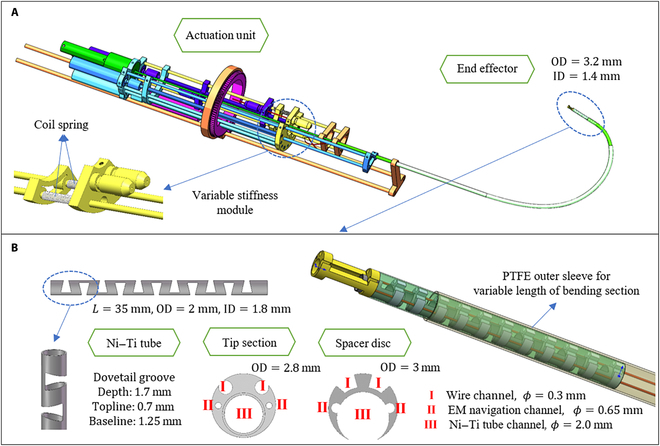
Transbronchial biopsy sampling, as a minimally invasive method with relatively low risk, has been proved to be a promising treatment in the field of respiratory surgery. Although several robotic bronchoscopes have been developed, it remains a great challenge to balance size and flexibility, while integrating multisensors to realize navigation during complex airway networks. This paper proposes a novel robotic bronchoscope system composed by end effector with relatively small size, relevant actuation unit, and navigation system with path planning and surgical guidance capability. The main part of the end effector is machined by bidirectional groove on a nickel-titanium tube, which can realize bending, rotation, and translation 3 degrees of freedom. A prototype of the proposed robotic bronchoscope system is designed and fabricated, and its performance is tested through several experiments to verify the stiffness, flexibility, and navigation performance. The results show that the proposed system is with good environment adaptiveness, and it can become a promising biopsy method through natural cavity of the human body.
经支气管活检采样作为一种风险相对较低的微创方法,已被证明在呼吸外科领域是一种有前景的治疗方式。尽管已经开发了几种机器人支气管镜,但在平衡尺寸和灵活性的同时,集成多传感器以在复杂气道网络中实现导航仍然是一个巨大的挑战。本文提出了一种新型机器人支气管镜系统,该系统由尺寸相对较小的末端执行器、相关驱动单元以及具有路径规划和手术引导能力的导航系统组成。末端执行器的主要部分通过在镍钛管上加工双向凹槽制成,可实现弯曲、旋转和平移3个自由度。设计并制造了所提出的机器人支气管镜系统的原型,并通过几个实验测试其性能,以验证刚度、灵活性和导航性能。结果表明,所提出的系统具有良好的环境适应性,并且通过人体自然腔道它可以成为一种有前景的活检方法。