Liu Fuchao, Su Zhong, Zhao Hui, Li Qing, Li Chao
School of Automation, Beijing Institute of Technology, Beijing 100081, China.
Beijing Key Laboratory of High Dynamic Navigation Technology, Beijing Information Science & Technological University, Beijing 100101, China.
Sensors (Basel). 2019 Apr 15;19(8):1799. doi: 10.3390/s19081799.
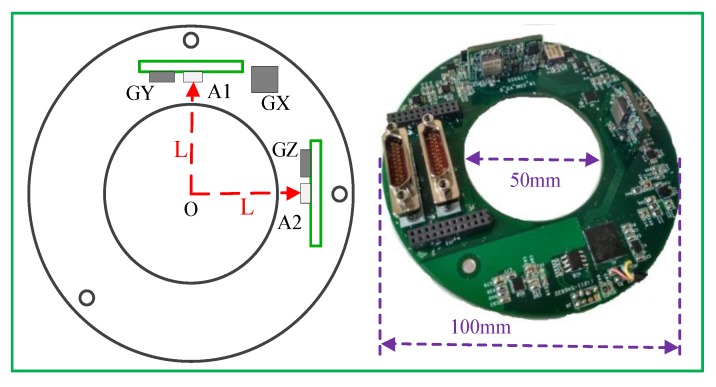
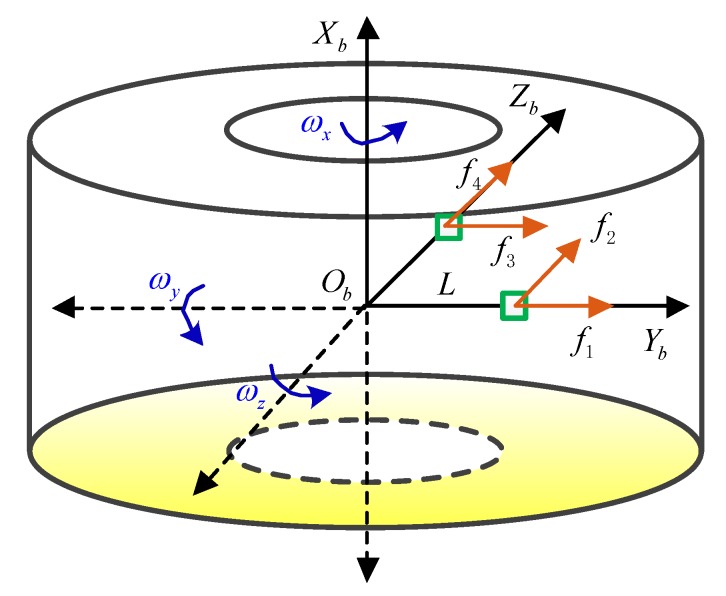
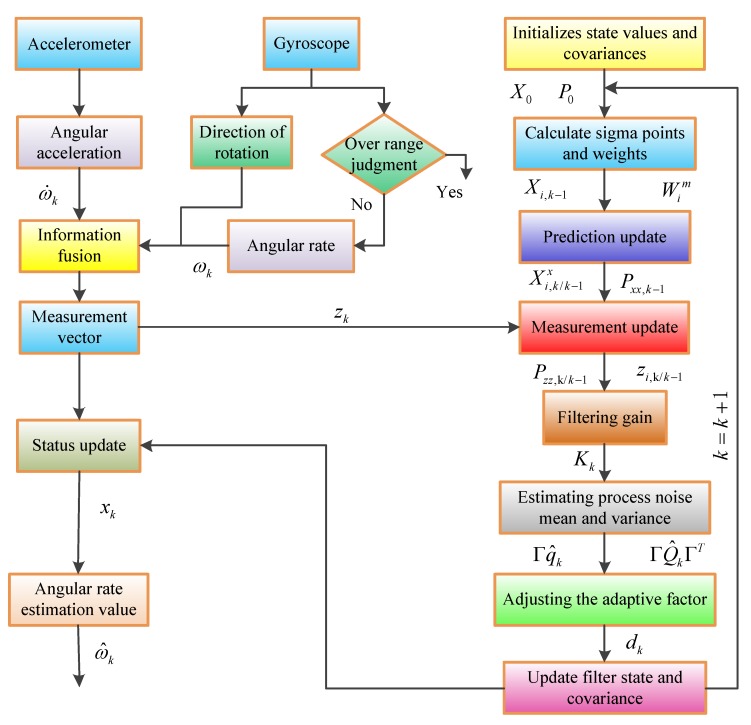
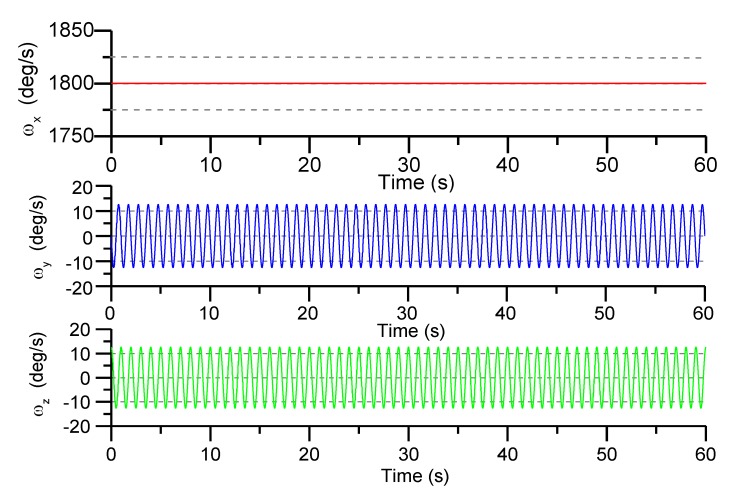
A low cost, high precision hollow structure MEMS IMU has been developed to measure the roll angular rate of a high-spinning projectile. The hollow MEMS IMU is realized by designing the scheme of non-centroid configuration of multiple accelerometers. Two dual-axis accelerometers are respectively mounted on the pitch axis and the yaw axis away from the center of mass of the high-spinning projectile. Three single-axis gyros are mounted orthogonal to each other to measure the angular rates, respectively. The roll gyro is not only used to judge the spinning direction, but also to measure and compensate for the low rotation speed of the high-spinning projectile. In order to improve the measurement accuracy of the sensor, the sensor output error is modeled and calibrated by the least square method. By analyzing the influence of noise statistical characteristics on angular rate solution accuracy, an adaptive unscented Kalman filter (AUKF) algorithm is proposed, which has a higher estimation accuracy than UKF algorithm. The feasibility of the method is verified by numerical simulation. By using the MEMS IMU device to build a semi-physical simulation platform, the solution accuracy of the angular rate is analyzed by simulating different rotation speeds of the projectile. Finally, the flight test is carried out on the rocket projectile with the hollow MEMS IMU. The test results show that the hollow MEMS IMU is reasonable and feasible, and it can calculate the roll angular rate in real time. Therefore, the hollow MEMS IMU designed in this paper has certain engineering application value for high-spinning projectiles.
为测量高速旋转弹丸的滚转角速率,已研制出一种低成本、高精度的空心结构微机电系统(MEMS)惯性测量单元(IMU)。该空心MEMS IMU通过设计多个加速度计的非质心配置方案来实现。两个双轴加速度计分别安装在远离高速旋转弹丸质心的俯仰轴和偏航轴上。三个单轴陀螺仪相互正交安装,分别用于测量角速率。滚转陀螺仪不仅用于判断旋转方向,还用于测量和补偿高速旋转弹丸的低转速。为提高传感器的测量精度,采用最小二乘法对传感器输出误差进行建模和校准。通过分析噪声统计特性对角速率解算精度的影响,提出了一种自适应无迹卡尔曼滤波器(AUKF)算法,该算法比无迹卡尔曼滤波器(UKF)算法具有更高的估计精度。通过数值模拟验证了该方法的可行性。利用MEMS IMU装置搭建半物理仿真平台,通过模拟弹丸不同转速分析角速率的解算精度。最后,在装有空心MEMS IMU的火箭弹上进行了飞行试验。试验结果表明,空心MEMS IMU合理可行,能够实时计算滚转角速率。因此,本文设计的空心MEMS IMU对高速旋转弹丸具有一定的工程应用价值。