Yuan Guangmin, Yuan Weizheng, Xue Liang, Xie Jianbing, Chang Honglong
Ministry of Education Key Laboratory of Micro and Nano Systems for Aerospace, Northwestern Polytechnical University, No. 127 Youyi West Road, Xi'an 710072, China.
Xi'an Research Institute of High Technology, Hongqing Town, Xi'an 710025, China.
Sensors (Basel). 2015 Oct 30;15(11):27590-610. doi: 10.3390/s151127590.
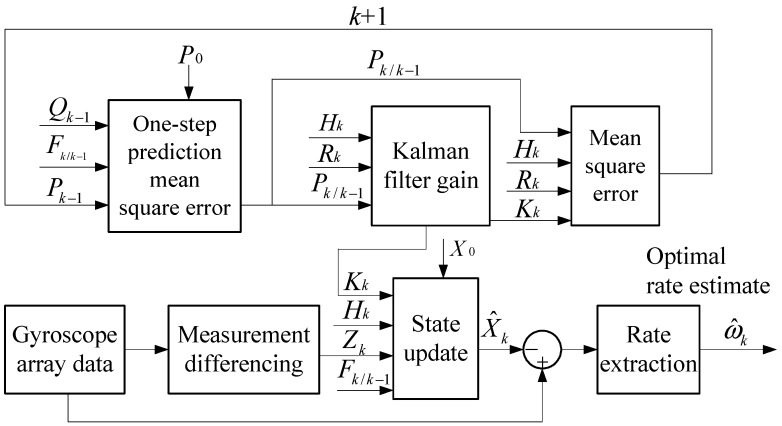
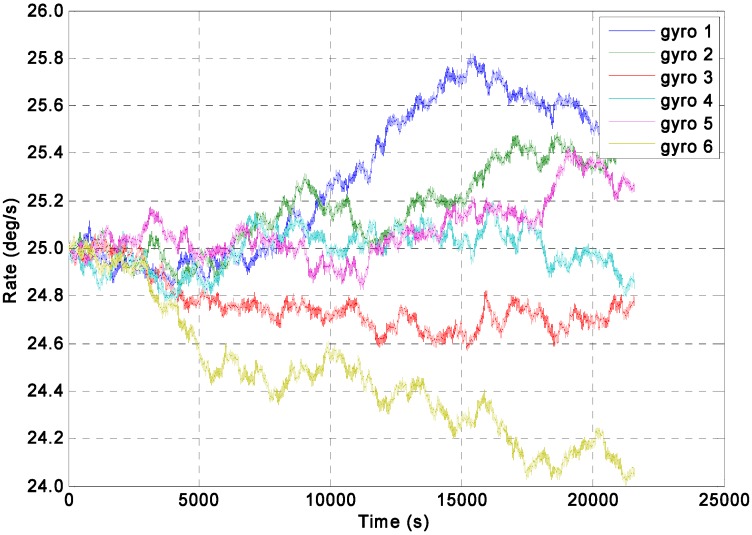
In this paper, the performance of two Kalman filter (KF) schemes based on the direct estimated model and differencing estimated model for input rate signal was thoroughly analyzed and compared for combining measurements of a sensor array to improve the accuracy of microelectromechanical system (MEMS) gyroscopes. The principles for noise reduction were presented and KF algorithms were designed to obtain the optimal rate signal estimates. The input rate signal in the direct estimated KF model was modeled with a random walk process and treated as the estimated system state. In the differencing estimated KF model, a differencing operation was established between outputs of the gyroscope array, and then the optimal estimation of input rate signal was achieved by compensating for the estimations of bias drifts for the component gyroscopes. Finally, dynamic simulations and experiments with a six-gyroscope array were implemented to compare the dynamic performance of the two KF models. The 1σ error of the gyroscopes was reduced from 1.4558°/s to 0.1203°/s by the direct estimated KF model in a constant rate test and to 0.5974°/s by the differencing estimated KF model. The estimated rate signal filtered by both models could reflect the amplitude variation of the input signal in the swing rate test and displayed a reduction factor of about three for the 1σ noise. Results illustrate that the performance of the direct estimated KF model is much higher than that of the differencing estimated KF model, with a constant input signal or lower dynamic variation. A similarity in the two KFs' performance is observed if the input signal has a high dynamic variation.
本文深入分析并比较了基于输入速率信号的直接估计模型和差分估计模型的两种卡尔曼滤波器(KF)方案,以结合传感器阵列的测量结果来提高微机电系统(MEMS)陀螺仪的精度。阐述了降噪原理,并设计了KF算法以获得最优速率信号估计值。直接估计KF模型中的输入速率信号采用随机游走过程建模,并视为估计的系统状态。在差分估计KF模型中,在陀螺仪阵列的输出之间进行差分运算,然后通过补偿各分量陀螺仪的偏置漂移估计值来实现输入速率信号的最优估计。最后,进行了六陀螺仪阵列的动态仿真和实验,以比较两种KF模型的动态性能。在恒速测试中,直接估计KF模型将陀螺仪的1σ误差从1.4558°/s降至0.1203°/s,差分估计KF模型则将其降至0.5974°/s。在摆动速率测试中,两种模型滤波后的估计速率信号都能反映输入信号的幅度变化,并且1σ噪声的降低因子约为三倍。结果表明,在输入信号恒定或动态变化较小的情况下,直接估计KF模型的性能远高于差分估计KF模型。如果输入信号具有高动态变化,则会观察到两种KF模型性能的相似性。