Shahid Talha, Gouwanda Darwin, Nurzaman Surya G, Gopalai Alpha A
School of Engineering, Monash University Malaysia, Jalan Lagoon Selatan, Bandar Sunway 47500, Malaysia.
Biomimetics (Basel). 2018 Jul 18;3(3):17. doi: 10.3390/biomimetics3030017.
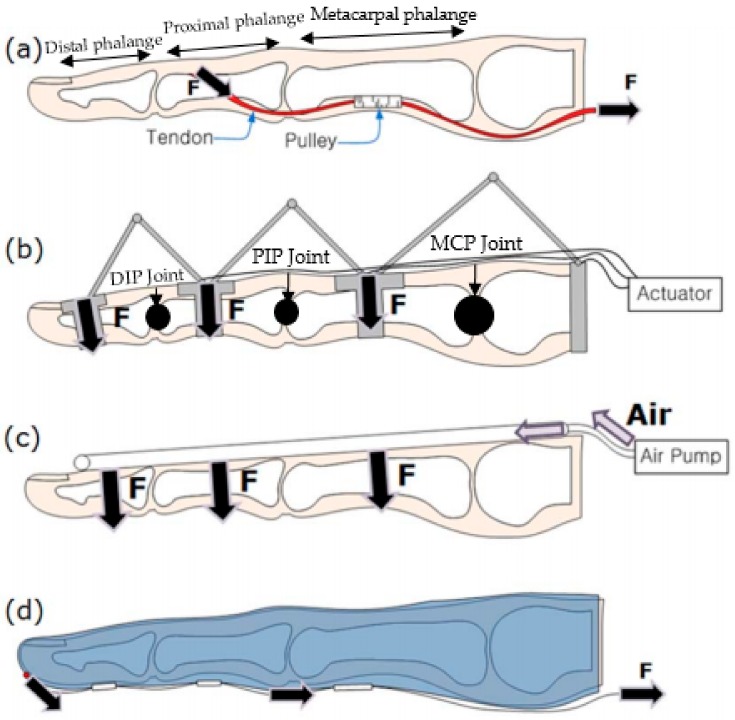
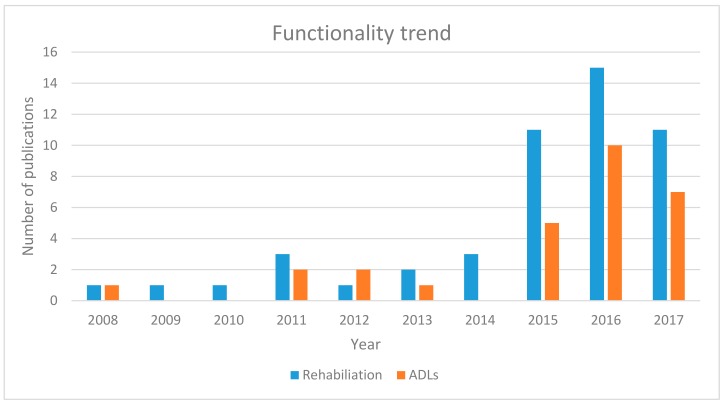
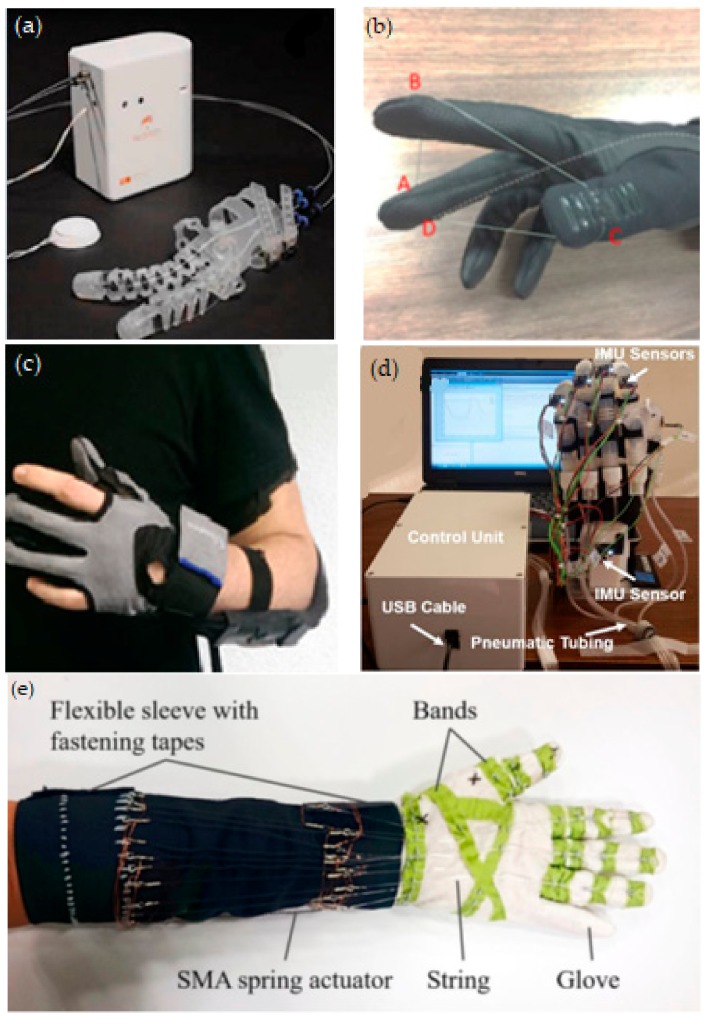
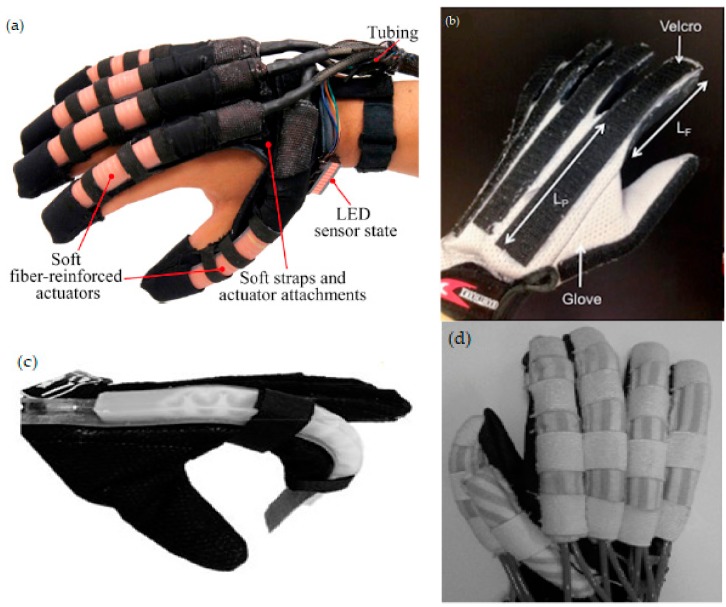
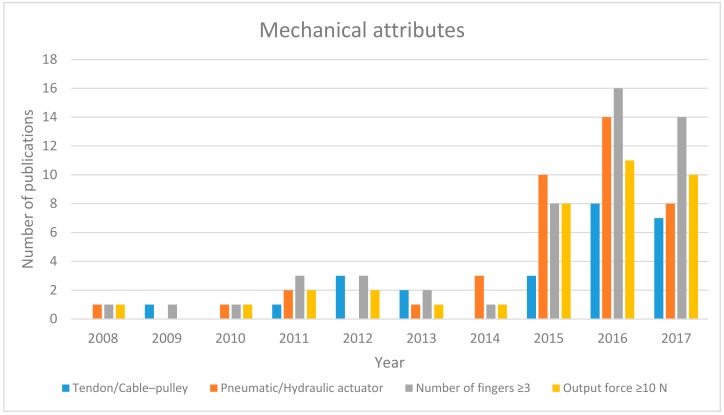
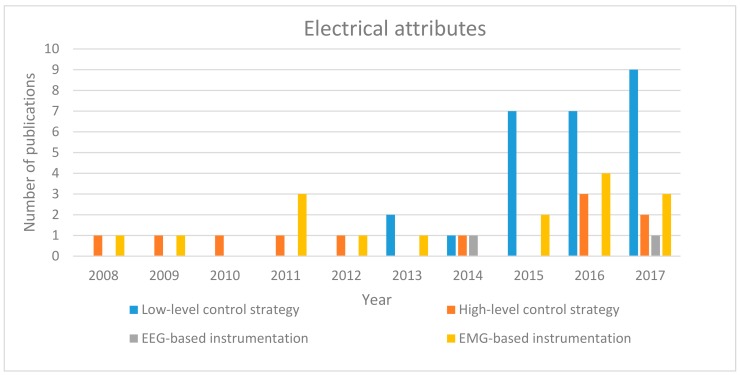
Soft robotics is a branch of robotics that deals with mechatronics and electromechanical systems primarily made of soft materials. This paper presents a summary of a chronicle study of various soft robotic hand exoskeletons, with different electroencephalography (EEG)- and electromyography (EMG)-based instrumentations and controls, for rehabilitation and assistance in activities of daily living. A total of 45 soft robotic hand exoskeletons are reviewed. The study follows two methodological frameworks: a systematic review and a chronological review of the exoskeletons. The first approach summarizes the designs of different soft robotic hand exoskeletons based on their mechanical, electrical and functional attributes, including the degree of freedom, number of fingers, force transmission, actuation mode and control strategy. The second approach discusses the technological trend of soft robotic hand exoskeletons in the past decade. The timeline analysis demonstrates the transformation of the exoskeletons from rigid ferrous materials to soft elastomeric materials. It uncovers recent research, development and integration of their mechanical and electrical components. It also approximates the future of the soft robotic hand exoskeletons and some of their crucial design attributes.
软机器人技术是机器人技术的一个分支,主要涉及由软材料制成的机电一体化和机电系统。本文概述了一项关于各种软机器人手部外骨骼的编年体研究,这些外骨骼具有不同的基于脑电图(EEG)和肌电图(EMG)的仪器和控制,用于康复和日常生活活动辅助。共回顾了45种软机器人手部外骨骼。该研究遵循两个方法框架:对外骨骼的系统回顾和编年体回顾。第一种方法基于不同软机器人手部外骨骼的机械、电气和功能属性总结其设计,包括自由度、手指数量、力传递、驱动模式和控制策略。第二种方法讨论了过去十年软机器人手部外骨骼的技术趋势。时间线分析展示了外骨骼从刚性铁材料到软弹性材料的转变。它揭示了其机械和电气部件的最新研究、开发和集成情况。它还预测了软机器人手部外骨骼的未来以及它们的一些关键设计属性。