Texas College of Osteopathic Medicine, University of North Texas Health Science Center, 3500 Camp Bowie Blvd, Fort Worth, 76107, TX, USA.
Department of Family and Manipulative Medicine, University of North Texas Health Science Center, 3500 Camp Bowie Blvd, Fort Worth, 76107, TX, USA.
J Neuroeng Rehabil. 2018 Feb 17;15(1):9. doi: 10.1186/s12984-018-0350-6.
The debilitating effects on hand function from a number of a neurologic disorders has given rise to the development of rehabilitative robotic devices aimed at restoring hand function in these patients. To combat the shortcomings of previous traditional robotics, soft robotics are rapidly emerging as an alternative due to their inherent safety, less complex designs, and increased potential for portability and efficacy. While several groups have begun designing devices, there are few devices that have progressed enough to provide clinical evidence of their design's therapeutic abilities. Therefore, a global review of devices that have been previously attempted could facilitate the development of new and improved devices in the next step towards obtaining clinical proof of the rehabilitative effects of soft robotics in hand dysfunction.
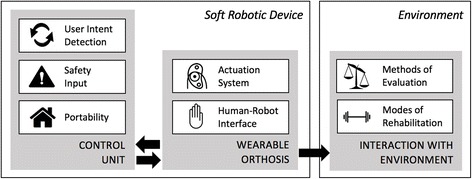
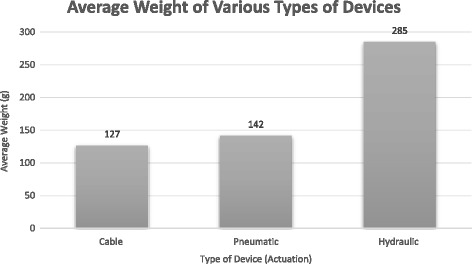
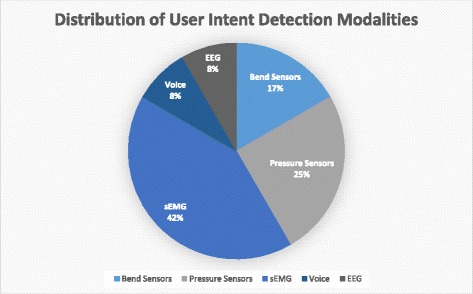
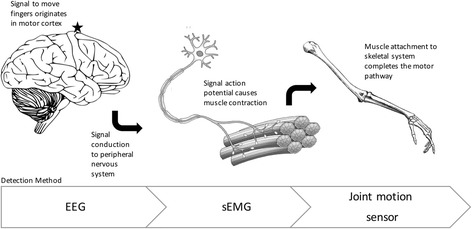
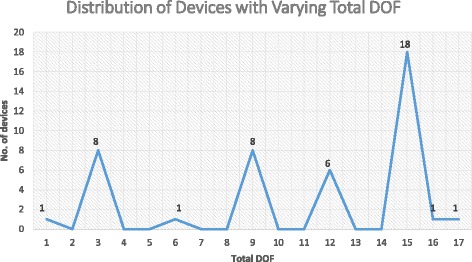
A literature search was performed in SportDiscus, Pubmed, Scopus, and Web of Science for articles related to the design of soft robotic devices for hand rehabilitation. A framework of the key design elements of the devices was developed to ease the comparison of the various approaches to building them. This framework includes an analysis of the trends in portability, safety features, user intent detection methods, actuation systems, total DOF, number of independent actuators, device weight, evaluation metrics, and modes of rehabilitation.
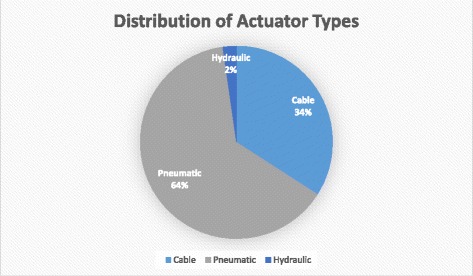
In this study, a total of 62 articles representing 44 unique devices were identified and summarized according to the framework we developed to compare different design aspects. By far, the most common type of device was that which used a pneumatic actuator to guide finger flexion/extension. However, the remainder of our framework elements yielded more heterogeneous results. Consequently, those results are summarized and the advantages and disadvantages of many design choices as well as their rationales were highlighted.
The past 3 years has seen a rapid increase in the development of soft robotic devices for hand rehabilitative applications. These mostly preclinical research prototypes display a wide range of technical solutions which have been highlighted in the framework developed in this analysis. More work needs to be done in actuator design, safety, and implementation in order for these devices to progress to clinical trials. It is our goal that this review will guide future developers through the various design considerations in order to develop better devices for patients with hand impairments.
许多神经疾病对手部功能造成的损害,促使人们开发了康复机器人设备,以恢复这些患者的手部功能。为了克服以前传统机器人的缺点,软机器人作为一种替代方法正在迅速兴起,因为它们具有固有安全性、更简单的设计和更高的便携性和有效性潜力。虽然有几个小组已经开始设计设备,但很少有设备能够取得足够的进展,为其设计的治疗能力提供临床证据。因此,对以前尝试过的设备进行全面审查,可以促进新的和改进的设备的开发,从而朝着获得软机器人对手部功能障碍康复效果的临床证据迈出下一步。
在 SportDiscus、Pubmed、Scopus 和 Web of Science 中进行了文献检索,以查找与手部康复软机器人设备设计相关的文章。开发了一个设备关键设计要素的框架,以方便比较构建它们的各种方法。该框架包括对手部康复软机器人设备设计的便携性、安全功能、用户意图检测方法、驱动系统、总自由度、独立驱动器数量、设备重量、评估指标和康复模式等趋势进行分析。
在这项研究中,根据我们开发的框架,共确定了 62 篇文章,代表了 44 个独特的设备,并对其进行了总结,以比较不同的设计方面。到目前为止,最常见的设备类型是使用气动致动器来引导手指的弯曲/伸展。然而,我们框架的其余元素产生了更具异质性的结果。因此,对这些结果进行了总结,并强调了许多设计选择的优缺点及其基本原理。
在过去的 3 年中,用于手部康复应用的软机器人设备的开发迅速增加。这些主要是临床前研究原型展示了广泛的技术解决方案,这些解决方案在本分析中开发的框架中得到了强调。为了使这些设备能够进入临床试验,需要在致动器设计、安全性和实施方面做更多的工作。我们的目标是,通过这个综述,为未来的开发者提供各种设计考虑因素,以便为手部受损的患者开发更好的设备。