Department of Mechanical Engineering, Politecnico di Milano, Milano, Italy.
Department of Electronics, Information and Bioengineering, Politecnico di Milano, Milano, Italy.
J Neuroeng Rehabil. 2022 Aug 10;19(1):87. doi: 10.1186/s12984-022-01065-9.
Soft robotic wearable devices, referred to as exosuits, can be a valid alternative to rigid exoskeletons when it comes to daily upper limb support. Indeed, their inherent flexibility improves comfort, usability, and portability while not constraining the user's natural degrees of freedom. This review is meant to guide the reader in understanding the current approaches across all design and production steps that might be exploited when developing an upper limb robotic exosuit.
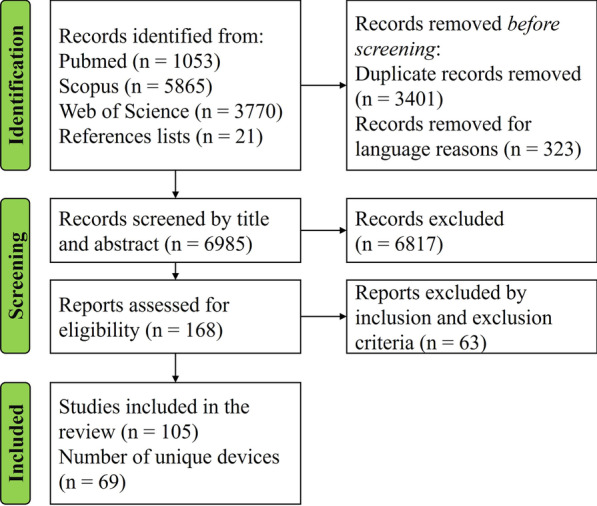
The literature research regarding such devices was conducted in PubMed, Scopus, and Web of Science. The investigated features are the intended scenario, type of actuation, supported degrees of freedom, low-level control, high-level control with a focus on intention detection, technology readiness level, and type of experiments conducted to evaluate the device.
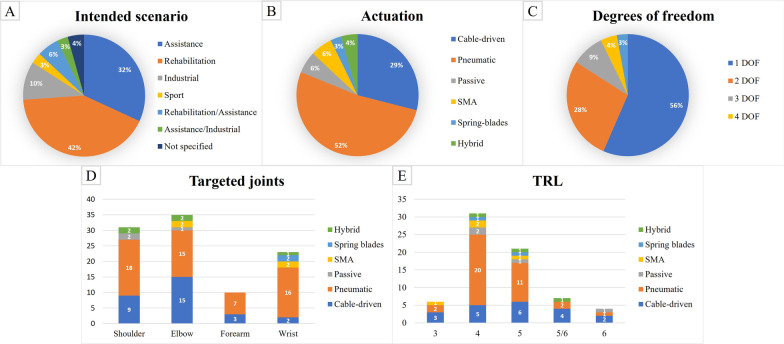
A total of 105 articles were collected, describing 69 different devices. Devices were grouped according to their actuation type. More than 80% of devices are meant either for rehabilitation, assistance, or both. The most exploited actuation types are pneumatic (52%) and DC motors with cable transmission (29%). Most devices actuate 1 (56%) or 2 (28%) degrees of freedom, and the most targeted joints are the elbow and the shoulder. Intention detection strategies are implemented in 33% of the suits and include the use of switches and buttons, IMUs, stretch and bending sensors, EMG and EEG measurements. Most devices (75%) score a technology readiness level of 4 or 5.
Although few devices can be considered ready to reach the market, exosuits show very high potential for the assistance of daily activities. Clinical trials exploiting shared evaluation metrics are needed to assess the effectiveness of upper limb exosuits on target users.
软机器人可穿戴设备,即外骨骼,可以作为刚性外骨骼的有效替代品,用于日常上肢支撑。事实上,它们固有的灵活性提高了舒适度、可用性和便携性,同时不会限制用户的自然自由度。本综述旨在指导读者了解在开发上肢机器人外骨骼时可以利用的所有设计和生产步骤的当前方法。
在 PubMed、Scopus 和 Web of Science 中进行了关于此类设备的文献研究。研究的特征是预期的场景、致动类型、支持的自由度、低级控制、高级控制,重点是意图检测、技术就绪水平以及用于评估设备的实验类型。
共收集了 105 篇文章,描述了 69 种不同的设备。根据它们的致动类型对设备进行分组。超过 80%的设备旨在用于康复、辅助或两者兼而有之。最常用的致动类型是气动(52%)和带电缆传输的直流电机(29%)。大多数设备致动 1 (56%)或 2 (28%)个自由度,目标关节最多的是肘部和肩部。意图检测策略在 33%的套装中实施,包括使用开关和按钮、IMU、拉伸和弯曲传感器、EMG 和 EEG 测量。大多数设备(75%)的技术就绪水平为 4 或 5。
尽管少数设备可以被认为已经准备好进入市场,但外骨骼在辅助日常活动方面显示出了非常高的潜力。需要进行临床试验,利用共享评估指标,以评估上肢外骨骼对目标用户的有效性。