Lee Jin Gyun, Brooks Allan M, Shelton William A, Bishop Kyle J M, Bharti Bhuvnesh
Cain Department of Chemical Engineering, Louisiana State University, Baton Rouge, LA, 70803, USA.
Department of Chemical Engineering, Pennsylvania State University, University Park, PA, 16802, USA.
Nat Commun. 2019 Jun 12;10(1):2575. doi: 10.1038/s41467-019-10579-1.
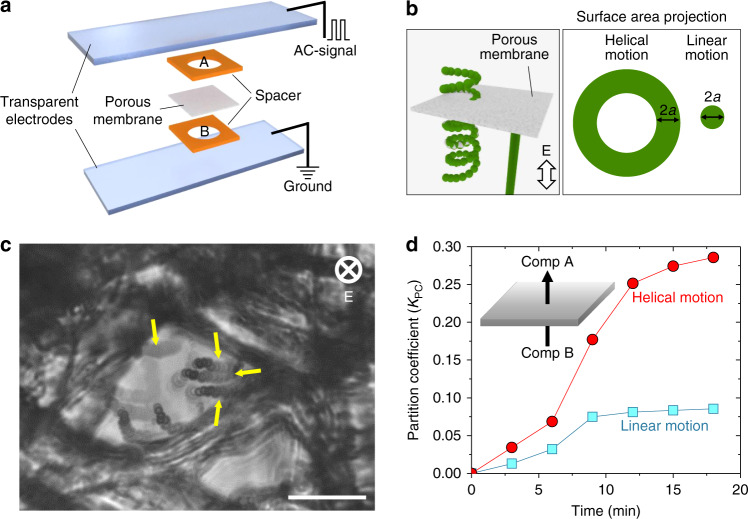
Active colloids are a class of microparticles that 'swim' through fluids by breaking the symmetry of the force distribution on their surfaces. Our ability to direct these particles along complex trajectories in three-dimensional (3D) space requires strategies to encode the desired forces and torques at the single particle level. Here, we show that spherical colloids with metal patches of low symmetry self-propel along non-linear 3D trajectories when powered remotely by an alternating current (AC) electric field. In particular, particles with triangular patches of approximate mirror symmetry trace helical paths along the axis of the field. We demonstrate that the speed and shape of the particle's trajectory can be tuned by the applied field strength and the patch geometry. We show that helical motion can enhance particle transport through porous materials with implications for the design of microrobots that can navigate complex environments.
活性胶体是一类通过打破其表面力分布的对称性在流体中“游动”的微粒。我们要在三维(3D)空间中沿着复杂轨迹引导这些粒子,就需要在单粒子层面上编码所需力和扭矩的策略。在此,我们表明,当由交变电流(AC)电场进行远程驱动时,具有低对称性金属贴片的球形胶体沿着非线性3D轨迹自行推进。特别是,具有近似镜像对称三角形贴片的粒子会沿着电场轴追踪螺旋路径。我们证明,粒子轨迹的速度和形状可以通过施加的场强和贴片几何形状进行调节。我们表明,螺旋运动可以增强粒子通过多孔材料的传输,这对能够在复杂环境中导航的微型机器人的设计具有重要意义。