Institute for Medical Science and Technology (IMSaT), Division of Imaging and Technology, School of Medicine, University of Dundee, Dundee, DD2 1FD, UK.
The BioRobotics Institute, Scuola Superiore Sant'Anna, 56025, Pisa, Italy.
Sci Rep. 2019 Jul 31;9(1):11109. doi: 10.1038/s41598-019-47320-3.
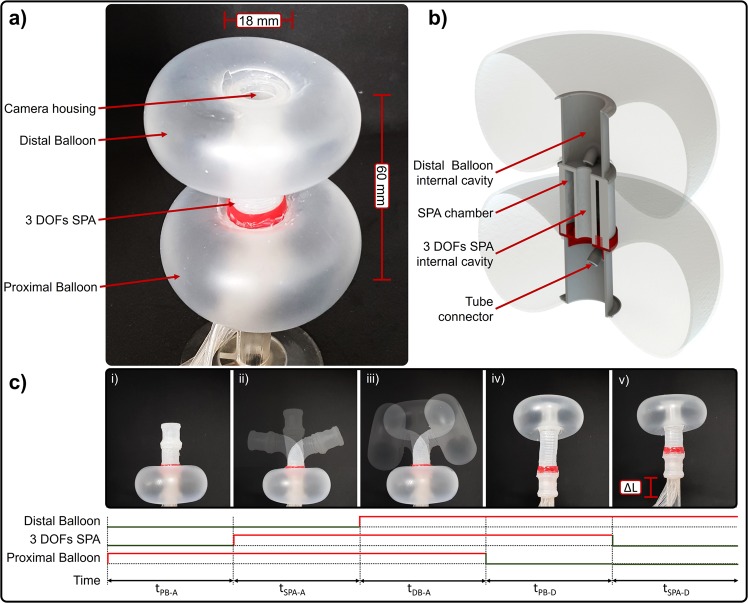
The design of a smart robot for colonoscopy is challenging because of the limited available space, slippery internal surfaces, and tortuous 3D shape of the human colon. Locomotion forces applied by an endoscopic robot may damage the colonic wall and/or cause pain and discomfort to patients. This study reports a Soft Pneumatic Inchworm Double balloon (SPID) mini-robot for colonoscopy consisting of two balloons connected by a 3 degrees of freedom soft pneumatic actuator. SPID has an external diameter of 18 mm, a total length of 60 mm, and weighs 10 g. The balloons provide anchorage into the colonic wall for a bio-inspired inchworm locomotion. The proposed design reduces the pressure applied to the colonic wall and consequently pain and discomfort during the procedure. The mini-robot has been tested in a deformable plastic colon phantom of similar shape and dimensions to the human anatomy, exhibiting efficient locomotion by its ability to deform and negotiate flexures and bends. The mini-robot is made of elastomer and constructed from 3D printed components, hence with low production costs essential for a disposable device.
用于结肠镜检查的智能机器人的设计具有挑战性,因为其可用空间有限、内部表面光滑以及人体结肠的三维形状复杂。内窥镜机器人施加的运动力可能会损坏结肠壁,并/或导致患者疼痛和不适。本研究报告了一种用于结肠镜检查的软气动尺蠖双气球(SPID)微型机器人,它由两个通过 3 自由度软气动致动器连接的气球组成。SPID 的外径为 18mm,总长度为 60mm,重量为 10g。气球为生物启发的尺蠖运动提供了在结肠壁上的锚固点。所提出的设计降低了施加在结肠壁上的压力,从而减少了手术过程中的疼痛和不适。该微型机器人已在形状和尺寸与人解剖结构相似的可变形塑料结肠模型中进行了测试,其通过能够变形和绕过弯曲处和弯曲处来展示有效的运动能力。微型机器人由弹性体制成,并由 3D 打印组件构建,因此具有用于一次性设备的必要低成本。