Department of Otorhinolaryngology, Head and Neck Surgery, Inselspital, Bern University Hospital, University of Bern, Bern, Switzerland.
Hearing Research Laboratory, ARTORG Center for Biomedical Engineering Research, University of Bern, Bern, Switzerland.
PLoS One. 2019 Aug 2;14(8):e0220543. doi: 10.1371/journal.pone.0220543. eCollection 2019.
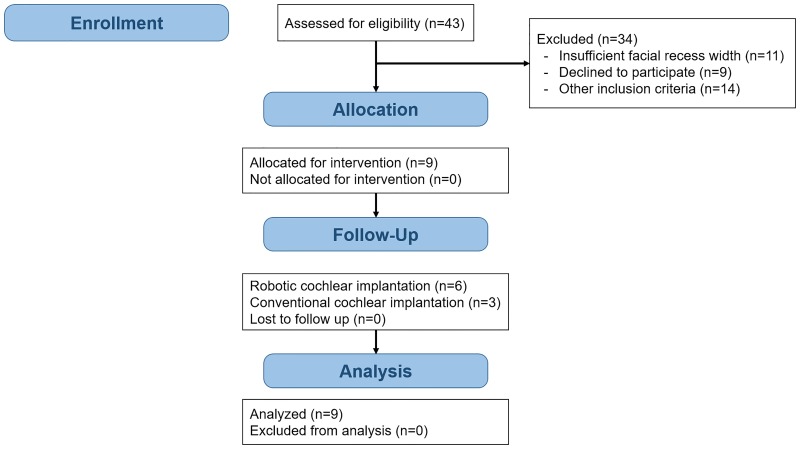
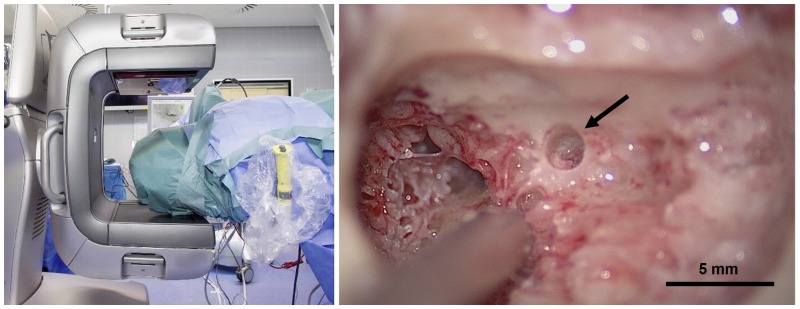
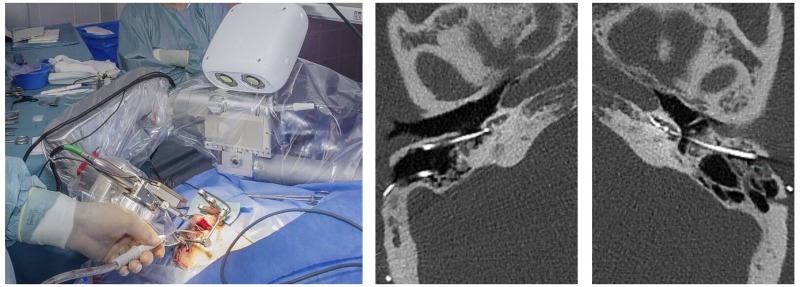
To demonstrate the feasibility of robotic middle ear access in a clinical setting, nine adult patients with severe-to-profound hearing loss indicated for cochlear implantation were included in this clinical trial. A keyhole access tunnel to the tympanic cavity and targeting the round window was planned based on preoperatively acquired computed tomography image data and robotically drilled to the level of the facial recess. Intraoperative imaging was performed to confirm sufficient distance of the drilling trajectory to relevant anatomy. Robotic drilling continued toward the round window. The cochlear access was manually created by the surgeon. Electrode arrays were inserted through the keyhole tunnel under microscopic supervision via a tympanomeatal flap. All patients were successfully implanted with a cochlear implant. In 9 of 9 patients the robotic drilling was planned and performed to the level of the facial recess. In 3 patients, the procedure was reverted to a conventional approach for safety reasons. No change in facial nerve function compared to baseline measurements was observed. Robotic keyhole access for cochlear implantation is feasible. Further improvements to workflow complexity, duration of surgery, and usability including safety assessments are required to enable wider adoption of the procedure.
为了在临床环境中证明机器人中耳入路的可行性,本临床试验纳入了 9 名因重度至极重度听力损失而需要人工耳蜗植入的成年患者。根据术前获得的计算机断层扫描图像数据,规划了通向鼓室的钥匙孔样通道,并通过机器人钻孔至面神经隐窝水平。术中进行影像学检查以确认钻孔轨迹与相关解剖结构之间有足够的距离。机器人继续向圆窗方向钻孔。外科医生手动完成耳蜗入路。在显微镜的监督下,通过鼓室切开术将电极阵列通过钥匙孔隧道插入。所有患者均成功植入人工耳蜗。在 9 例患者中,机器人钻孔均按计划完成至面神经隐窝水平。出于安全原因,有 3 例患者的手术恢复为传统方法。与基线测量值相比,面神经功能无变化。机器人钥匙孔入路用于人工耳蜗植入是可行的。需要进一步改进工作流程的复杂性、手术持续时间和可用性,包括安全性评估,以实现该手术的更广泛应用。