Dept. of Biomedical Engineering, Case Western Reserve University, 10900 Euclid Avenue, Wickenden Building, Cleveland, OH, 44106, USA.
Louis Stokes Veterans Affairs Medical Center, Cleveland, OH, USA.
J Neuroeng Rehabil. 2019 Aug 2;16(1):100. doi: 10.1186/s12984-019-0571-3.
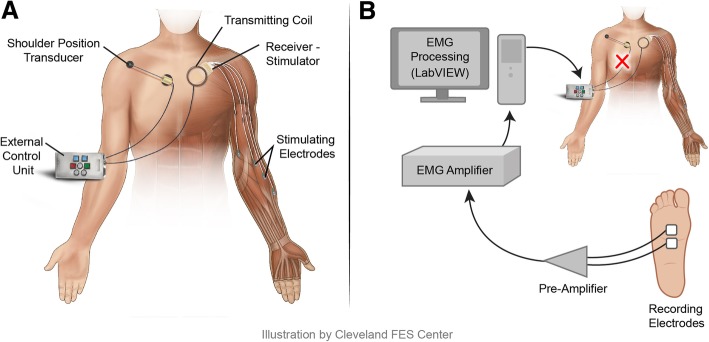
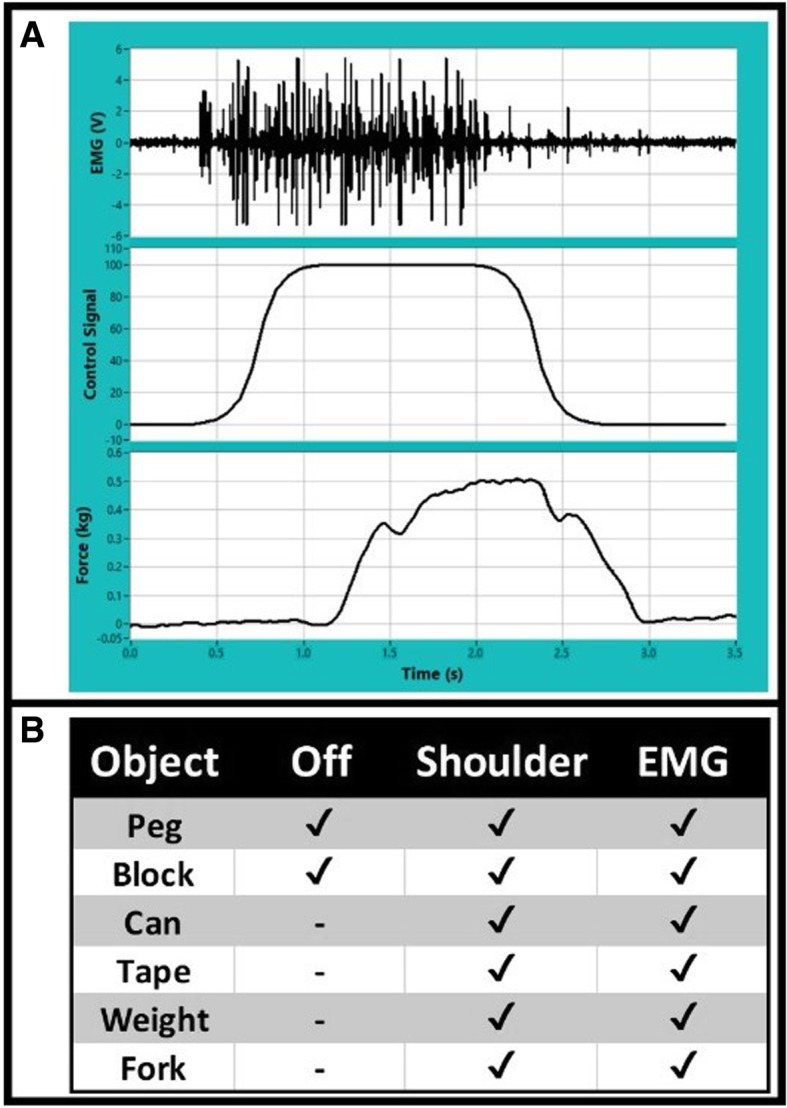
Implanted motor neuroprostheses offer significant restoration of function for individuals with spinal cord injury. Providing adequate user control for these devices is a challenge but is crucial for successful performance. Electromyographic (EMG) signals can serve as effective control sources, but the number of above-injury muscles suitable to provide EMG-based control signals is very limited. Previous work has shown the presence of below-injury volitional myoelectric signals even in subjects diagnosed with motor complete spinal cord injury. In this case report, we present a demonstration of a hand grasp neuroprosthesis being controlled by a user with a C6 level, motor complete injury through EMG signals from their toe flexor. These signals were successfully translated into a functional grasp output, which performed similarly to the participant's usual shoulder position control in a grasp-release functional test. This proof-of-concept demonstrates the potential for below-injury myoelectric activity to serve as a novel form of neuroprosthesis control.
植入式运动神经假体为脊髓损伤患者提供了显著的功能恢复。为这些设备提供足够的用户控制是一项挑战,但对于成功的性能至关重要。肌电图 (EMG) 信号可以作为有效的控制源,但适合提供基于 EMG 的控制信号的损伤以上肌肉数量非常有限。以前的工作表明,即使在被诊断为运动完全性脊髓损伤的受试者中,也存在损伤以下的自主肌电信号。在本病例报告中,我们展示了一名 C6 水平运动完全性损伤的患者通过脚趾屈肌的 EMG 信号来控制手抓神经假体。这些信号成功地转化为功能性抓握输出,其在抓握-释放功能测试中的表现与参与者通常的肩部位置控制相似。这个概念验证证明了损伤以下肌电活动作为一种新型神经假体控制的潜力。